sigalasi
-
Αναρτήσεις
5 -
Εντάχθηκε
-
Τελευταία επίσκεψη
του/της sigalasi Επιτεύγματα
")





-
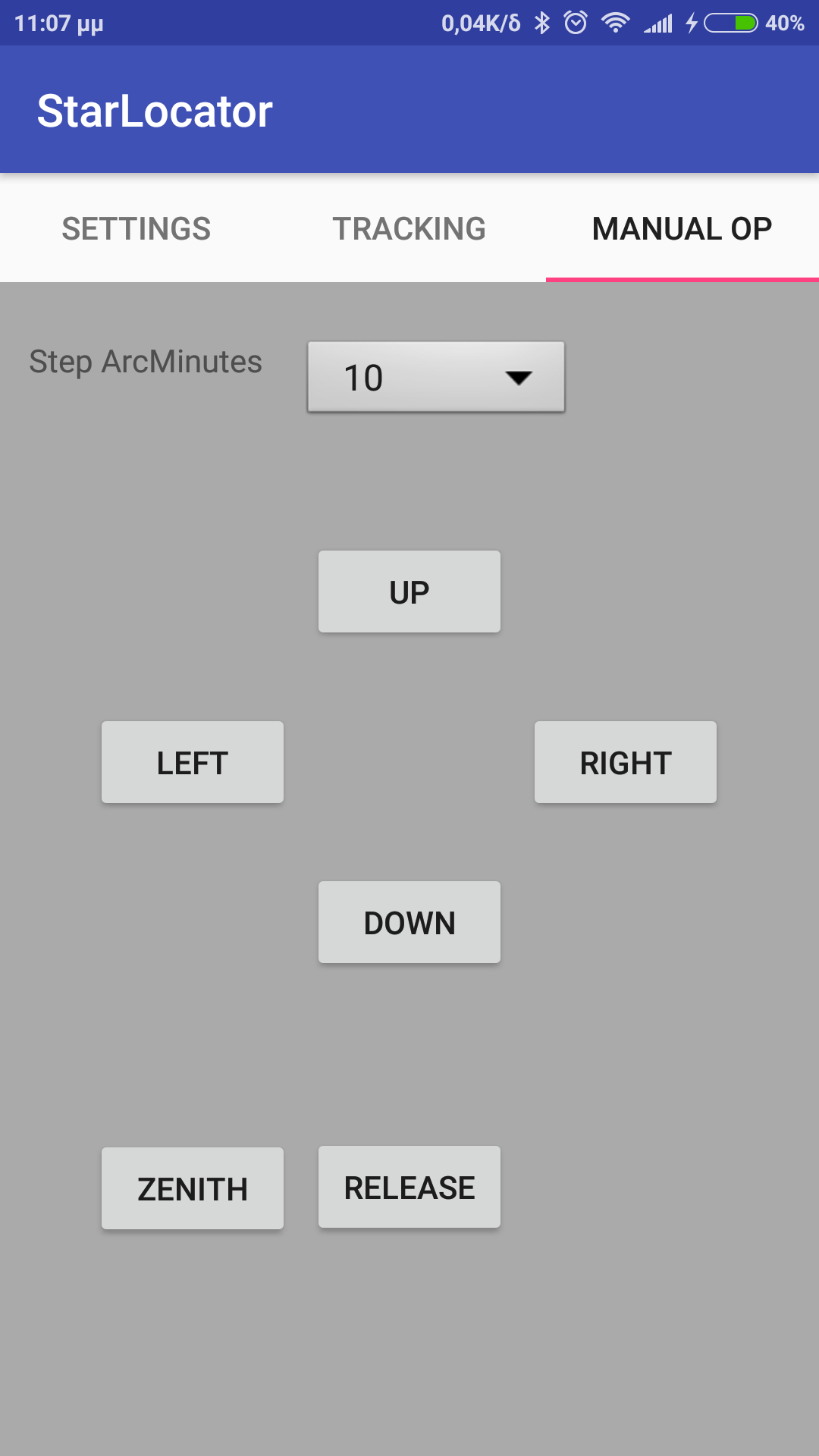
Το ανέβασα στο φάκελο που γράφω πιο πάνω, το είχα ξεχάσει σε μία αλλαγή. Οι διακοπές ήταν καλή ευκαιρία για αρκετές δοκιμές, αν και η υγρασία στο νησί δεν βοηθούσε. Είδα και εγώ την ανάγκη για κουμπιά κάπου κοντά στο προσοφθάλμιο γιατί η διαδικασία να βγάλεις το μάτι, να ψάξεις στο κινητό και να ξαναβρείς την νυχτερινή όραση ήταν κουραστική. Στις περισσότερες περιπτώσεις με το ερευνητικό 32mm ο στόχος ήταν μέσα στο ορατό πεδίο. Με μικρότερο δεν το έβρισκα πάντα. Έχω υπόψιν κάποιες τροποποιήσεις και στην εφαρμογή και στο τηλεσκόπιο αλλά μάλλον θα περιμένουν λίγο καιρό
-
Μετά από αρκετές δοκιμές είμαι έτοιμος και περιμένω να καθαρίσει ο ουρανός! Δοκίμασα πιο χοντρό ιμάντα και αλυσίδα ποδηλάτου, χωρίς να δω σημαντική βελτίωση στο ύψος. Το καλό είναι ότι στο αζιμούθιο που είχα μεγαλύτερο πρόβλημα έχει γίνει πολύ καλό. Στο ύψος το θέμα είναι μόνο όταν αλλάζω προσοφθάλμιο και μπορώ να το αντιμετωπίσω μετακινώντας μερικά arcminutes από το κινητό. Σχετικά με την εφαρμογή νομίζω ότι έχει γίνει αρκετά εύχρηστη. Προς το παρόν την έχω δοκιμάσει μόνο σε android 7. Δεν θα σας κουράσω με πολλές τεχνικές λεπτομέρειες αλλά αν κάποιος θέλει μπορεί να την κατεβάσει από εδώ https://bitbucket.org/jsig80/starlocator/src/master/ και να προτείνει αλλαγές ή βελτιώσεις. Επίσης στο φάκελο raw υπάρχει και το sketch του arduino που όπως μπορείτε να δείτε είναι πολύ απλό, δεν κάνει κανένα υπολογισμό, αλλά μόνο μεταβιβάζει τις εντολές στα stepper.

-
Ευχαριστώ για την εμπειρία που μοιράζεσαι, ξέρω πόσο κόπο χρειάζεται για να την αποκτήσεις. Προς το παρόν έχω εφαρμόσει την απλούστερη λύση, το κουμπί goto σε πάει στο στόχο αλλά αφήνει τα stepper ελεύθερα ώστε να κάνεις διορθώσεις χειροκίνητα. Μετά πατάς το tracking και ακολουθεί πολύ ικανοποιητικά. Κατα διεύθυνση το βελτίωσα αρκετά βάζοντας ένα ελατήριο με σφικτήρα (το έκρυψα στο 1,2 cm ανάμεσα στο κινητό και σταθερό μέρος της βάσης). Στο ύψος ψάχνω κατάλληλο ιμάντα και αν αυτό δεν είναι αρκετό θα πάω στους κοχλίες που προτείνεις. Με το bluetooth έχω μία καθυστέρηση γιατί στριμώχνοντας όλα μέσα στο κουτί ακούμπησε ένα καλώδιο στη γείωση και το έκαψα! Σαν πρωτάρης στο android ξεκίνησα με android studio και java που την ξέρω. Από λειτουργικότητα είναι έτοιμη, βελτιώσεις σε look and feel, validation και λοιπά διακοσμητικά χρειάζεται. Μόλις συνδέσω το bluetooth θα ανεβάσω φωτογραφίες και κώδικα για όποιον θέλει να προτείνει βελτιώσεις. Ευχαριστώ για τα σχόλια σας, σε λίγες μέρες θα επανέλθω με νεότερα
-
Ευχαριστώ πολύ. Δεν το έχω δοκιμάσει σε καλές συνθήκες, περιμένω το bluetooth για να παίζει από το κινητό και έναν καλύτερο ιμάντα για να μην χάνω το μηδενισμό όταν αλλάζω προσοφθάλμια (αλλάζει το κέντρο βάρους και η ελαστικότητα του ιμάντα επιτρέπει μία μικρή μετακίνηση). Το κόστος για τα ρουλεμάν ήταν 8 ευρώ, για το μηχανισμό στο αζιμούθιο άλλα 6 και arduino, shield, drivers, stepper ιμάντες κλπ 100 ευρώ. Το bluetooth έχει περίπου 8 ευρώ και είναι και ντίζες, βίδες παξιμάδια κλπ που όλα μαζί πάνε άλλα 10. Όλα αυτά από ελληνικό μαγαζί, αν τα παραγγείλεις απ' έξω θα έχει σημαντική διαφορά. Το πρόβλημα που είχα εγώ ήταν ότι δεν ήξερα ακριβώς τι θα χρειαστώ οπότε έπρεπε να πάω από το μαγαζί για να τα δώ πριν αποφασίσω τι θα πάρω. Η εφαρμογή σε android είναι σχεδόν έτοιμη, όταν ολοκληρωθεί και συνδεθεί θα ανεβάσω printscreen και βίντεο
-
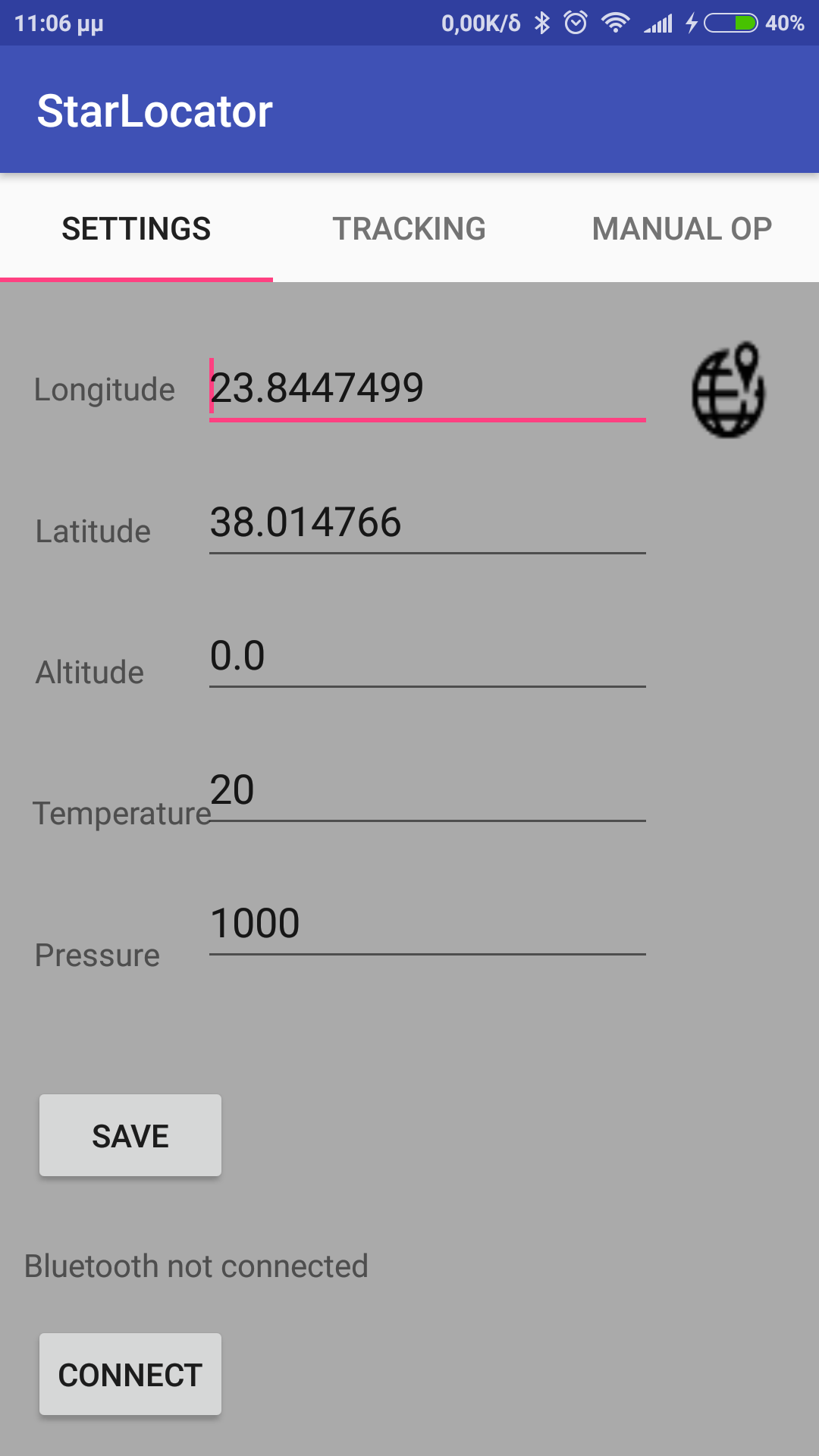
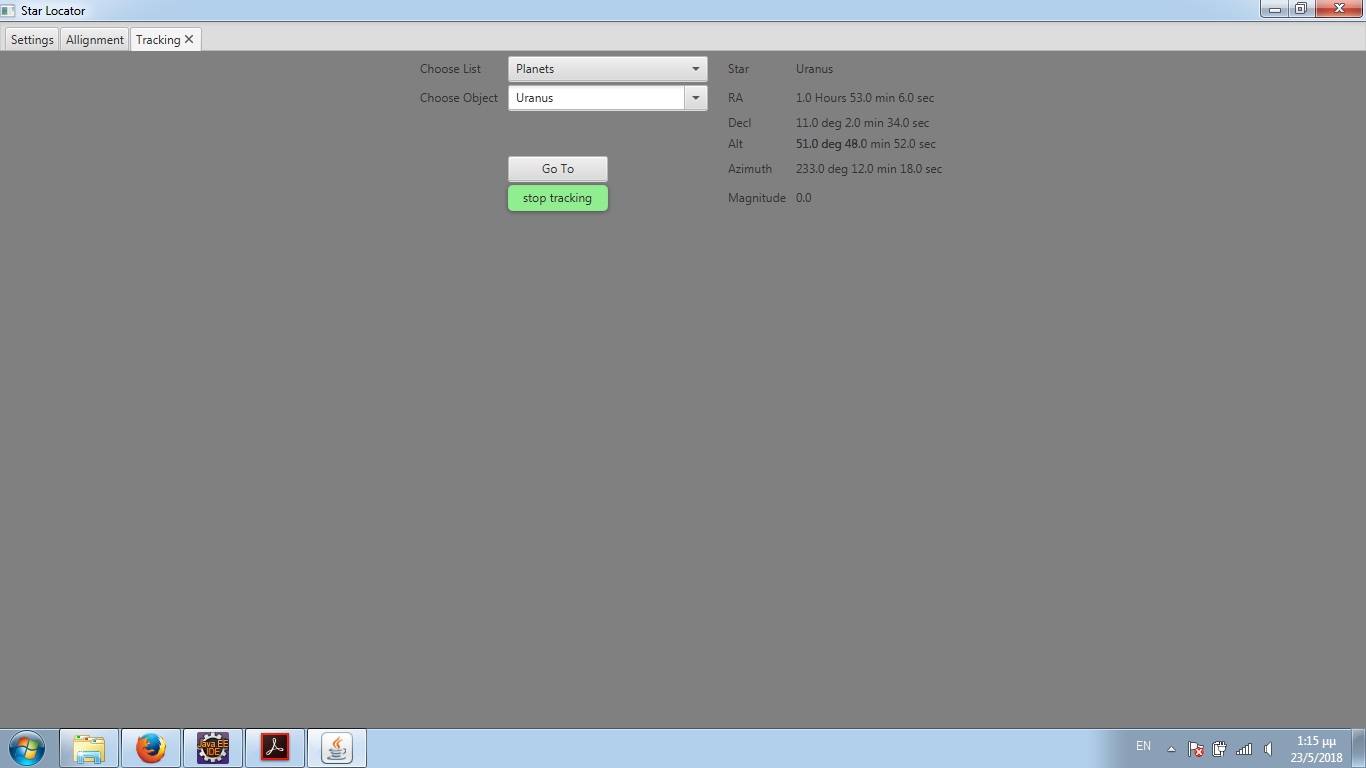
Μετά από αρκετή μελέτη ξεκίνησα τη μετατροπή του 10' SkyWatcher σε GoTo. Για να τα πάρουμε με τη σειρά, η πρώτη τροποποίηση ήταν ρουλεμάν στο αζιμούθιο και στο ύψος. Βοήθησαν πολύ παλαιότερα posts από τον Τάσο Βρατόλη, αλλά αντί για 8 ρουλεμαν έβαλα 4 και από 1 παξιμάδι σε ρόλο αποστάτη. Επίσης επειδή τα ρουλεμάν είναι 21mm και όχι 20, έκλεψα το 1mm βάζοντας βίδες M5 αντί για M6. Κατα διεύθυνση έβαλα μηχανισμό τηλεόρασης από κατάστημα με υλικά επιπλοποϊας, ήταν πιο εύκολο να το βρω και πιο αθόρυβο από το lazy susan. Και αρχίζουν τα πιο δύσκολα! για την κίνηση στο ύψος έβαλα ντίζα M10 που περιστρέφεται από stepper μοτερ. Στη συνέχεια ένας ιμάντας μεταφέρει την κίνηση σε τροχαλία βιδωμένη εκεί που βίδωνε κανονικά το χερούλι. Κατα διεύθυνση το stepper γυρίζει πάνω σε ιμάντα κολλημένο στο σταθερό τμήμα της βάσης (ιδέα από Μανούσο). Η δυνατότητα μικρομετρικής κίνησης στο ύψος πριν βάλω το μοτερ ήταν τεράστια αναβάθμιση σε σχέση με την κίνηση με το χέρι και σίγουρα κάτι που αξίζει τον κόπο ακόμα και αν δεν θέλει κανείς να μπλέξει με μοτερ, laptop, ρεύμα κλπ. Με μισή στροφή κάθε 1-2 λεπτά κρατάς κάθε στόχο στο κέντρο του προσοφθάλμιου. Το επόμενο βήμα είναι η οδήγηση των stepper από arduino. Εκεί κράτησα τα πράγματα όσο πιο απλά γινόταν, κάνοντας όλους τους υπολογισμούς σε java και μεταφέροντας στο arduino μόνο τις εντολές 'τόσα βήματα δεξια, τόσα επάνω'. Χρησιμοποίησα το cnc shield αν και δεν είναι απαραίτητο αλλά για να είναι πιο τακτοποιμένα καλώδια, πυκνωτές κλπ και 2 drivers drv8825. Επίσης ενεργοποίησα το microstepping ώστε κατα την παρακολούθηση να είναι πιο ομαλή η κίνηση κυρίως στη διεύθυνση. Το ποιο χρονοβόρο ήταν το γράψιμο της εφαρμογής. Εκεί βρήκα λίστες των αντικειμένων Messier, Caldwell, την λίστα H. Draper καθώς και την λίστα Hipparchos της ESA και τις έβαλα στην εφαρμογή κάνοντας την σωστή αναγωγή στο τρέχον έτος για την κάθεμία. Επίσης έγραψα τον αλγόριθμο από εδώ http://stjarnhimlen.se/comp/tutorial.html για τους πλανήτες. Για την ευθυγράμμιση επειδή θα ξέρω ήδη τη θέση μου και θα είναι επίπεδο το τηλεσκόπιο, επέλεξα μηδενισμό σε ένα αστέρι (οποιοδήποτε) και μετατροπή των συντεταγμένων σε altAz με τον τρόπο που περιγράφει ο Paul Schlyter πιο πάνω. Μετά από δοκιμές και διορθώσεις κατάφερα να υπολογίζει σωστά όλες τις παραπάνω λίστες. Το αποτέλεσμα! Στην παρακολούθηση βάζω 10! Ακόμα και σε μεγενθύνσεις χ200 ο στόχος μένει εντός του πεδίου με μικρές μετακινήσεις γύρω από το κέντρο. Βέβαια δεν περιμένω να είναι ακίνητος πχ για φωτογράφηση αλλά για παρατήρηση μένει συνεχώς κοντά στο κέντρο, η κίνηση είναι ομαλή και σχεδόν αθόρυβη. Για το GoTo χρειάζεται κάποια βελτίωση γιατί μερικές φορές δεν πετυχαίνω το στόχο. Στο ύψος ο ιμάντας έχει κάποια ελαστικότητα και θέλω να τον αντικαταστήσω με πιο χοντρό. Κατα διεύθυνση όταν ζοριστεί πηδάει δόντια και έχω 1-2 ιδέες για να βελτιωθεί. Το βάρος που έχει προστεθεί στη βάση είναι λιγότερο από κιλό και το μόνο επιπλέον που χρειάζεται στο στήσιμο είναι το σφίξιμο μίας βίδας (εντατήρας του ιμάντα). Στη συνέχεια θα προστεθεί bluetooth και android εφαρμογή για να μην απαιτείται το laptop στο βουνό! Ευκαιρία να μάθω android που όλο το αναβάλω! Περιμένω ιδέες, προτάσεις. Αν θέλει κάποιος την εφαρμογή ή τον κώδικα του arduino μπορώ να το ανεβάσω σε ένα github