KC
-
Αναρτήσεις
3100 -
Εντάχθηκε
-
Τελευταία επίσκεψη
-
Ημέρες που κέρδισε
25
Τύπος περιεχομένου
Forum
Λήψεις
Ιστολόγια
Αστροημερολόγιο
Άρθρα
Αστροφωτογραφίες
Store
Αγγελίες
Όλα αναρτήθηκαν από KC
-
 Ένα ανοιχτό σμήνος στον αστερισμό του Περσέα. Απέχει 1800 έτη φωτός από τη Γη. Ο αρχικός στόχος ήταν να ολοκληρώσω με σύνθεση LRGB όμως οι καιρικές συνθήκες δεν επέτρεψαν να πάρω λήψεις σε B. Έτσι αυτό που βλέπετε είναι το αποτέλεσμα του LRG median combine. Η συγκεκριμένη λήψη πραγματοποιήθηκε από την Κηφισιά. Vixen VC200L f/6.4, sbig st2000xm
Ένα ανοιχτό σμήνος στον αστερισμό του Περσέα. Απέχει 1800 έτη φωτός από τη Γη. Ο αρχικός στόχος ήταν να ολοκληρώσω με σύνθεση LRGB όμως οι καιρικές συνθήκες δεν επέτρεψαν να πάρω λήψεις σε B. Έτσι αυτό που βλέπετε είναι το αποτέλεσμα του LRG median combine. Η συγκεκριμένη λήψη πραγματοποιήθηκε από την Κηφισιά. Vixen VC200L f/6.4, sbig st2000xm -
 Γεια σου Θεόδωρε, η αστροφωτογράφιση με στόχο τις ωραίες φωτογραφίες είναι τέχνη. Την ανυπομονησία που περιέγραψες την είχα και εγω στα πρώτα μου βήματα. Με τον καιρό και την εμπειρία που θα αποκτάς θα γίνεσαι ακόμα καλύτερος. Έχεις φοβερό εξοπλισμό και είναι θέμα χρόνου να βγάλεις παπάδες όπως είπε και ο Γιώργος!
Γεια σου Θεόδωρε, η αστροφωτογράφιση με στόχο τις ωραίες φωτογραφίες είναι τέχνη. Την ανυπομονησία που περιέγραψες την είχα και εγω στα πρώτα μου βήματα. Με τον καιρό και την εμπειρία που θα αποκτάς θα γίνεσαι ακόμα καλύτερος. Έχεις φοβερό εξοπλισμό και είναι θέμα χρόνου να βγάλεις παπάδες όπως είπε και ο Γιώργος! -

Auto-guiding: ST-4 vs pulse guiding
KC απάντησε στην συζήτηση του/της KC σε Λήψη αστροφωτογραφίας deep sky
Ίσως αξίζει κάποιος να πάρει γράφημα για τον ίδιο οδηγητικό αστέρα με τις δυο μεθόδους και να συγκρίνει αποτελέσματα. Ένα καλό tool εδώ http//countingoldphotons.com/phdlab-downloads/ -
Auto-guiding: ST-4 vs pulse guiding
KC απάντησε στην συζήτηση του/της KC σε Λήψη αστροφωτογραφίας deep sky
Το έψαξα το θέμα και σας παραθέτω αυτά που βρήκα ST4 - η κάμερα συνδέεται με ειδικό καλώδιο στην ST4 θύρα της στήριξης - η στήριξη ανταποκρίνεται γρηγορότερα στις εντολές τις κάμερας αν ο αλγόριθμος autoguiding τρέχει μέσα στο λογισμικό της κάμερας - όταν η οδηγητική κάμερα στέλνει εντολές στη στήριξη, η στήριξη σταματά για λίγο την οδήγηση μέχρι να ολοκληρωθεί η διαδικασία της διόρθωσης σε Ra/Dec Pulse - Μέσω του EQASCOM στέλνονται εντολές στη στήριξη - Χρησιμοποιούνται λιγότερα καλώδια σε σχέση με την ST4 λύση - για κάποιες στηρίξεις η μέθοδος αυτή δε λειτουργεί καλά - έχουμε καλύτερα αποτελέσματα σε σχέση με την ST4 λύση, όταν η λύση pulse χρησιμοποιείται σε συνδυασμό με EQASCOM autoPEC Προσωπικά έχω δοκιμάσει και τις δυο μεθόδους και οι δυο μου φαίνοντε εξίσου καλές. Όμως βρίσκω τη δεύτερη ευκολότερη και πιο εύχρηστη από την πρώτη, ειδικά κατα τη φωτογράφιση με narrowband φίλτρα π.χ. Ha. -
Dithering με pulse autoguiding και PHD
KC απάντησε στην συζήτηση του/της KC σε Λήψη αστροφωτογραφίας deep sky
Με ST4 autoguiding χρησιμοποιώ αποκλειστικά το maximdl. Δεν ξέρω αν/πως γίνεται με το PHD-Nebulosity... -
Dithering με pulse autoguiding και PHD
KC απάντησε στην συζήτηση του/της KC σε Λήψη αστροφωτογραφίας deep sky
Το έψαξα λίγο από τα manuals των δυο προγραμμάτων Διαθέτω - Skywatcher HEQ5 synscan pro - Skywatcher 9x50 finderscope+DMK21AU04 Για να κάνω autoguiding με αυτό τον εξοπλισμό, συνδέομαι στο EQMOD και ενεργοποιώ το pulse guiding Μετά ανοίγω το PHD και συνδέομαι σε Skywatcher HEQ5, DMK21AU04 PHD Tools -> Enable Server Μετά στο Nebulosity Nebulosity View->PHD link Θέτω During Download=active Small Dither Settle at <0.5 Τα settings αυτά στο Nebulosity είναι καλά για το σύστημα μου; Guide camera DMK21AU04 Pixel size H 5.6 µm, V 5.6 µm Guide scope focal length=50mm -
Γεια σας Γνωρίζω ότι κανεις μπορεί να κάνει dithering όταν χρησιμοποιεί το PHD σε συνδυασμό με το Nebulosity. Και έχει ενεργοποιήσει pulse guiding στο EQMOD. Θα μπορούσε κάποιος που το έχει κάνει στην πράξη να περιγράψει τις ρυθμίσεις που χρειάζοντε; Επίσης το PHD μπορεί να συνεργαστεί με κάποιο άλλο πρόγραμμα π.χ. maximdl για το σκοπό αυτό;
-
Γεια σας Ο τίτλος τα λέει όλα ποια είναι τα πλεονεκτήματα/μειονεκτήματα κάθε μεθόδου; Ποια μέθοδος είναι η καλύτερη; Για να δούμε απαντήσεις )
-
 Νέα καλύτερη επεξεργασία εδώ http://www.albireo.gr/astrogallery/nebulae/diffuse/2014.10.12/IC1871.html
Νέα καλύτερη επεξεργασία εδώ http://www.albireo.gr/astrogallery/nebulae/diffuse/2014.10.12/IC1871.html -
Plate solving με MaximDL για CCD λήψεις πολλαπλών νυχτών
KC απάντησε στην συζήτηση του/της KC σε Αστροφωτογράφιση - Γενική συζήτηση
Το πρόβλημα εντοπίστηκε και λύθηκε. Όταν έκανα λήψη με το MaximDL αυτό δεν κατέγραψε τις συντεταγμένες RA/DEC στο FIT header του αρχείου οι οποίες χρειάζονται για να γίνει το plate solving. Το MaximDL γράφει αυτες τις συνεταγμένες όταν γίνει σύνδεση στο τηλεσκόπιο από το Observatory Control που υπάρχει στο πρόγραμμα. Κατέβασα την τελευταία έκδοση του PinPoint (pinpoint.dc3.com) και έβαλα χειροκίνητα τις συντεταγμένες οπότε το πρόγραμμα τις πρόσθεσε αυτόματα στο header. Οπότε τώρα είμαστε μια χαρά ) Όλα δουλεύουν ρολόι! -
Plate solving με MaximDL για CCD λήψεις πολλαπλών νυχτών
KC απάντησε στην συζήτηση του/της KC σε Αστροφωτογράφιση - Γενική συζήτηση
Ευχαριστώ πολύ Το πρόβλημα το αντιμετωπίζω με το PinPoint καθυστερεί πολύ να κάνει plate solving και κάποιες άλλες φορές δεν κάνει καθόλου οπότε πρέπει να το διακόψω...δοκίμασα και με διαφορετικά settings π.χ. stars to solve 50 αντί για 500, αλλαγή star brightness απο -2 σε 20 -> 4 σε 16 αλλά το πρόβλημα συνεχίζεται χωρίς να ξέρω τι πραγματικά φταίει. Έβαλα και το σωστό image scale τι να πω... Αν κάποιος έχει κάποια ιδέα. -
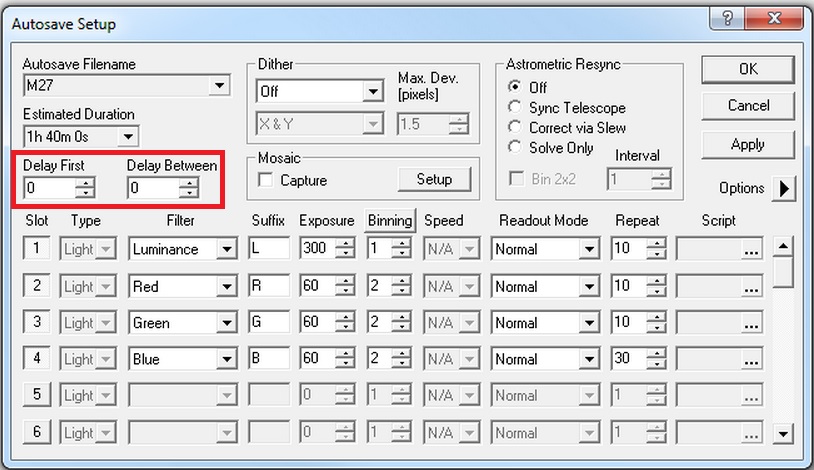
Για όποιον ενδιαφέρεται τελικά δεν είναι θέμα οδηγητικού αστέρα. Φταίει που δεν είχα ορίσει delay timer ανάμεσα στις λήψεις Ha και RGB. Για μικρές εκθέσεις 1-2 λεπτών πρέπει να το ορίσεις και προτείνετε να το βάζεις 4-5 φορές του χρόνου οδήγησης. Αλλιώς θα έχεις πρόβλημα που περιέγραψα. Για μεγάλες εκθέσεις 5-10 λεπτών και μηδέν να το αφήσεις δεν υπάρχει κανένα πρόβλημα. Παραπέμπω και το σχετικό απόσπασμα από το manual του MaximDL Set Delay First and Delay Between to 0. Delay Between can be used to provide some extra time between exposures for the autoguider to settle (by default there is a minimum 5 second delay when the guider is running). You can also set a settling criterion based on the autoguider error using the Guide Tab Options menu.

-
Plate solving με MaximDL για CCD λήψεις πολλαπλών νυχτών
KC δημοσίευσε μια συζήτηση σε Αστροφωτογράφιση - Γενική συζήτηση
Γεια σας Έχω ετοιμάσει αυτό τον οδηγό (tutorial) που εξηγεί πως κάποιος που δουλεύει το EQMOD, MaximDL-Pinpoint, Sky6 μπορεί να πάρει λήψεις με CCD κάμερα για τον ίδιο στόχο σε πολλαπλές νύχτες. Δεν έχω εφαρμόσει το plate solving στην πράξη και αυτό που γράφω είναι ύστερα από έρευνα που έχω κάνει για το θέμα. Φυσικά υπάρχουν και άλλα προγράμματα π.χ. sequence generator pro... αλλά δε θέλω προς το παρόν να επεκταθώ σε αυτά. Όποιος έχει εμπειρία με αυτά που περιγράφω παρακαλώ να κάνει ένα review του οδηγου αυτού. Ευχαριστώ https//www.dropbox.com/s/cuen709sagfh4vw/Pinpoint_guide.doc?dl=0 -
Σας ευχαριστώ πολύ!
-
IC 1871 is a faint emission nebula located in the constellation Cassiopeia. This nebula is part of a much larger structure called IC 1848 also known as the Embryo or Soul Nebula. Τεχνικά χαρακτηριστικά λήψης Optics: Vixen ED81s @ f/5.2 Mount: HEQ5 synscan Pro Guiding: ST-237 guide chip of SBIG ST2000XM Camera: SBIG ST2000XM Filter Wheel: SBIG CFW9 Filters: Baader Ha, Astronomik RGB CCD Temperature: 0 degrees Celsius Constellation: Cassiopeia Date: 11-12 Oct, 2014 Location: Kifisia, Greece Exposure Red : 60 min (60x1 min) Green : 60 min (60x1 min) Blue : 60 min (60x1 min) Ha: 200 min (20x10 min) Binning: 1x1(R,G,B,Ha) Total exposure 6.2 h Calibration: Darks,Flats,Bias Software: MaximDL, CCDstack, Photoshop Dithering for Ha/R,G,B subexposures; All subframes calibrated in MaximDL; CCDIS register/normalize/median combine in CCDstack; produce RGB frame in CCDstack; HaRGB combine in Photoshop; Final touches in Photoshop.
-
επιλέγεις το information tool και το βάζεις σε aperture mode και το βλέπεις.
-
κινείσαι σε σωστό δρόμο )
-
 Πολύ καλή προσπάθεια συγχαρητήρια!
Πολύ καλή προσπάθεια συγχαρητήρια! -
Πρόβλημα με ευθυγράμμιση λήψεων R,G,B και Ha
KC απάντησε στην συζήτηση του/της KC σε Λήψη αστροφωτογραφίας deep sky
Γεια σου Μάριε Σε ευχαριστώ για το πρόγραμμα που ανέφερες. Το έχεις δουλέψει στην πράξη; -
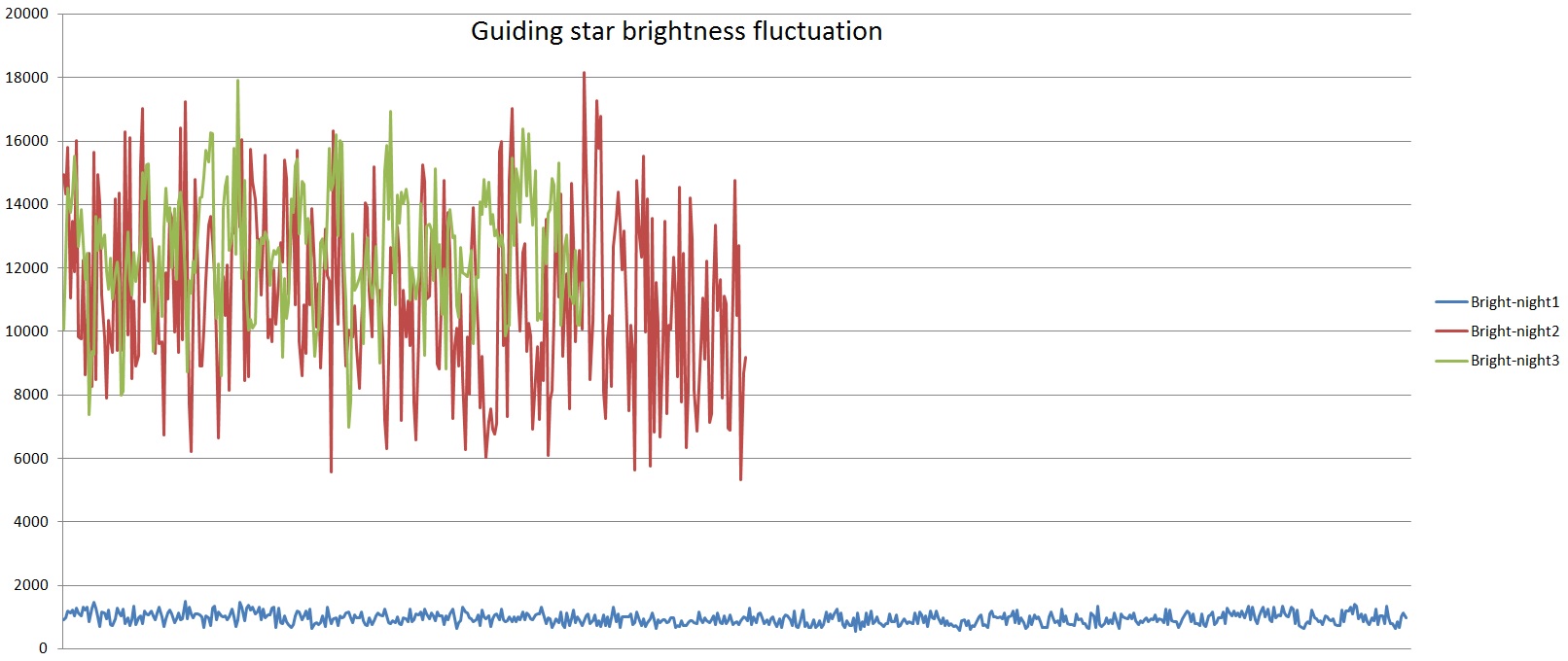
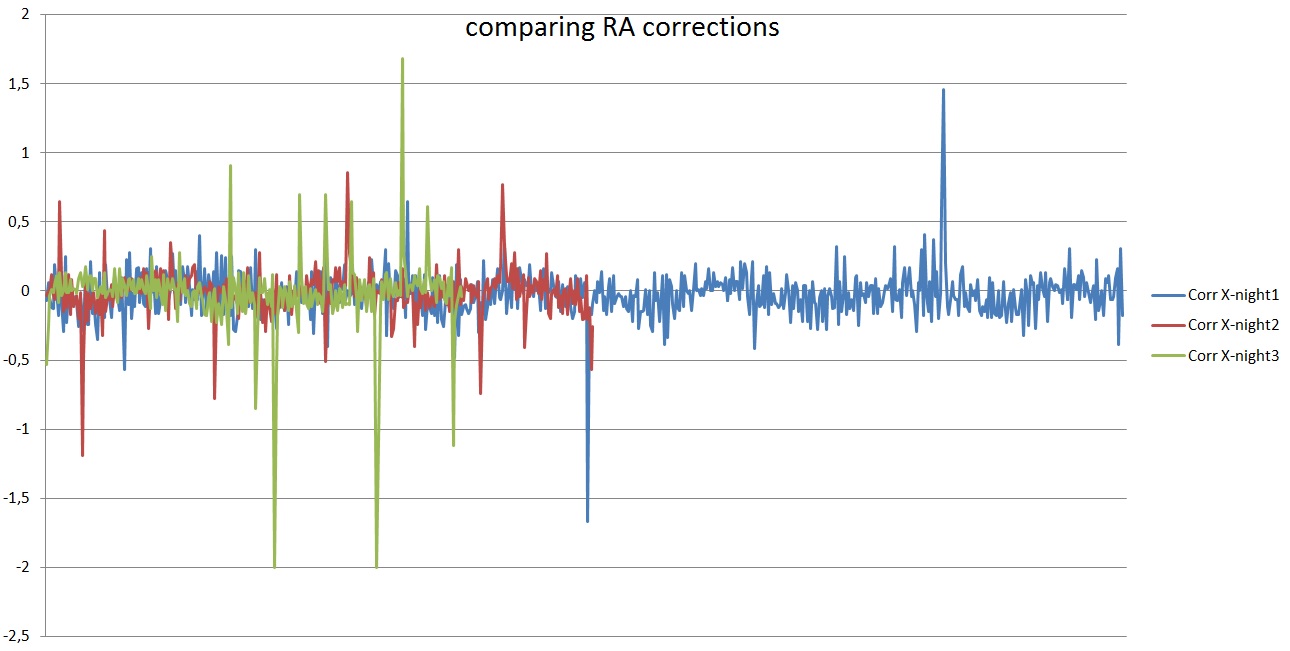
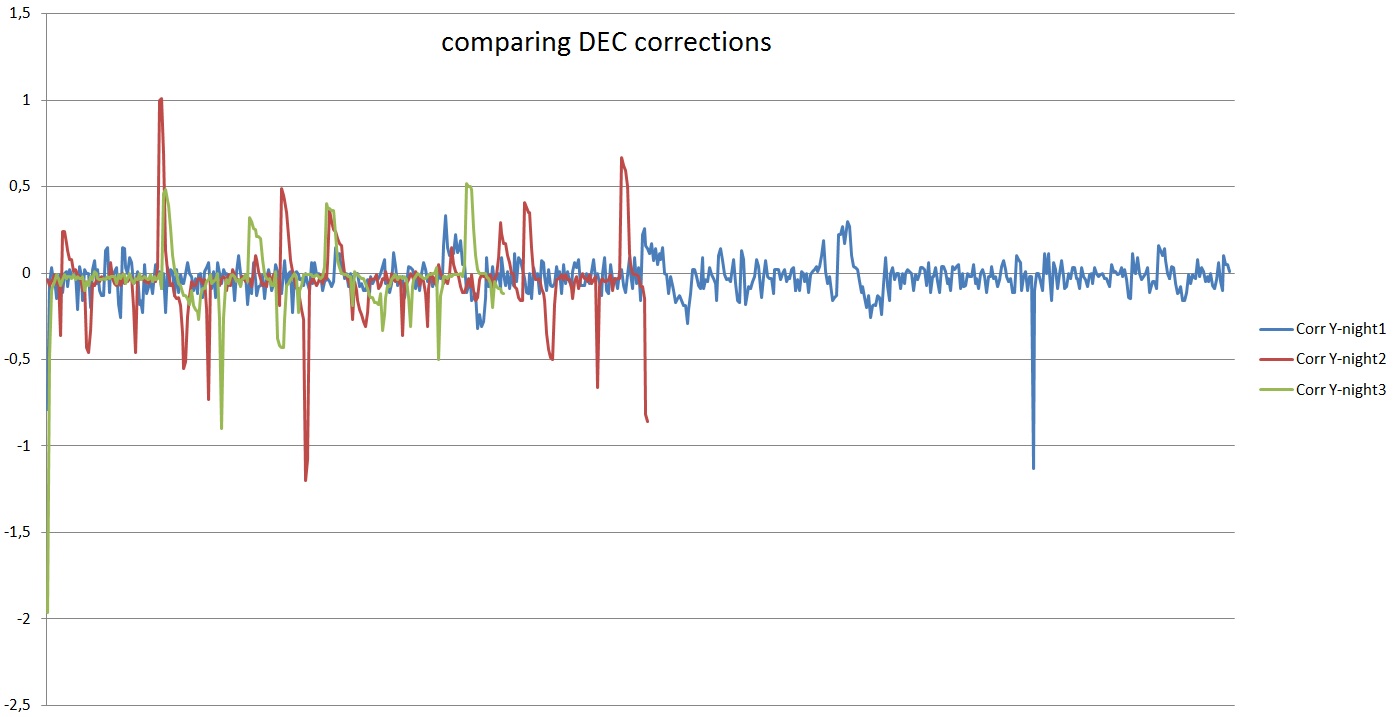
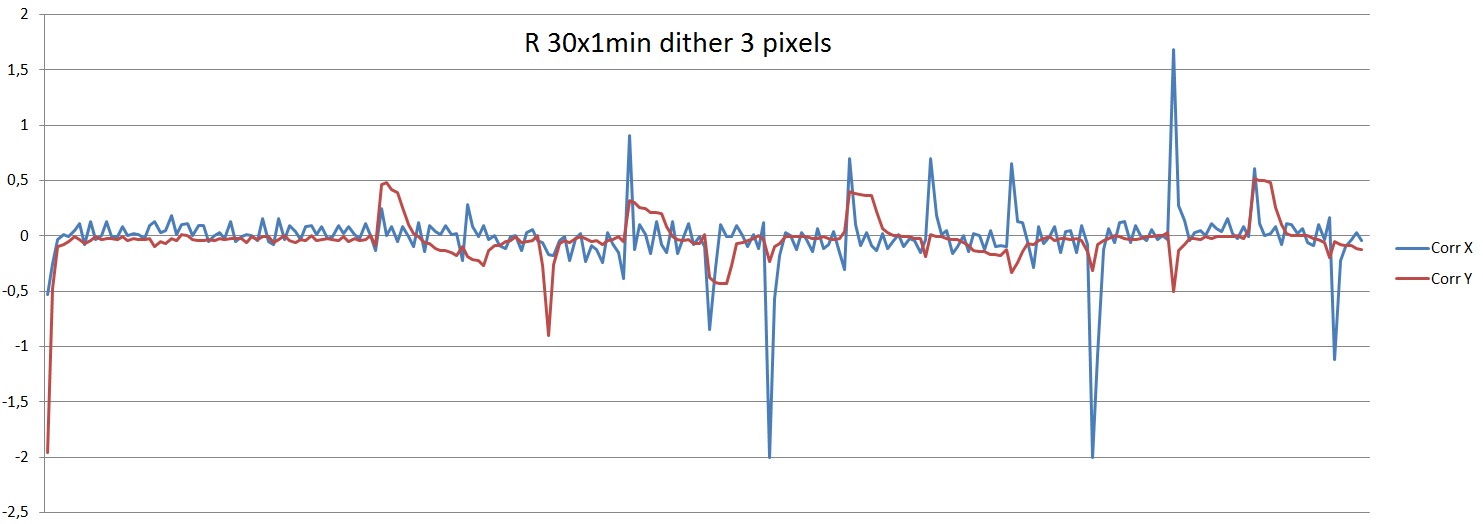
Το έψαξα λίγο το θέμα μελετώντας καλά τα γραφήματα από το MaximDL. Έχω αρχίσει να πιστεύω ότι το πρόβλημα δημιουργήθικε από τις έντονες διακυμάνσεις της λαμπρότητας του αστέρα οδηγού τις νύχτες 2,3. Ίσως λόγω κακού seeing, ίσως κάποιο σύννεφο στα ανώτερα στρώματα που δεν ήταν εύκολα ορατό διαγυμνού οφαθαλμού. Όπως και να έχει πιστεύω είναι θέμα του οδηγητικού αστέρα. Άφησα το MaximDL να τον επιλέξει αυτόματα ενώ θα μπορούσα με ένα click να επέλεγα το αστέρι που ήθελα εγώ. Συμπέρασμα να μελετάτε τα γραφήματα βγαίνουν αξιόλογα συμπεράσματα από αυτά. Διακυμάνσεις λαμπρότητας οδηγητικού αστέρα Διορθώσεις σε RA Διορθώσεις σε DEC
-
Με βάση τα γραφήματα και τα track logs που επισύναψα μπορεί κάποιος να μου εξηγήσει γιατί η αυτόματη οδήγηση δεν πήγε καλά τη 2η και 3η βραδιά; Και κάτι που ξέχασα την 3η βραδιά το MaximDL μου εμφάνισε μήνυμα λάθους "autoguiding error" χωρίς να μου λέει που οφείλετε. Τέλος έχω διαπιστώσει ότι το MaximDL επιλέγει αυτόματα ένα άστρο για να κάνει τις διορθώσεις σε X-Y. Μπορώ να το ρυθμίσω ώστε να επιλέγεται manually το άστρο;
-
Την τρίτη βραδιά ρύθμισα το MaximDL να πάρει για τον ίδιο στόχο 30x1min λήψεις σε φίλτρο R. Το dithering μεταξύ των λήψεων το έβαλα στα 2 pixels. Η αυτόματη οδήγηση πήγε πάλι χάλια. Επισυνάπτω γράφημα και το track log από το MaximDL. TRACKING_ERROR2.txt maximdl - track log2
-
Τη δεύτερη βραδιά ρύθμισα το MaximDL να πάρει για τον ίδιο στόχο 60x1min λήψεις σε κάθε φίλτρο R,G,B. Το dithering μεταξύ των λήψεων το έβαλα στα 2 pixels. Η αυτόματη οδήγηση πήγε χάλια. Επισυνάπτω γράφημα και το track log από το MaximDL. TRACKING_ERROR.txt maximdl track log - 2η βραδιά Λήψεις RGB
-
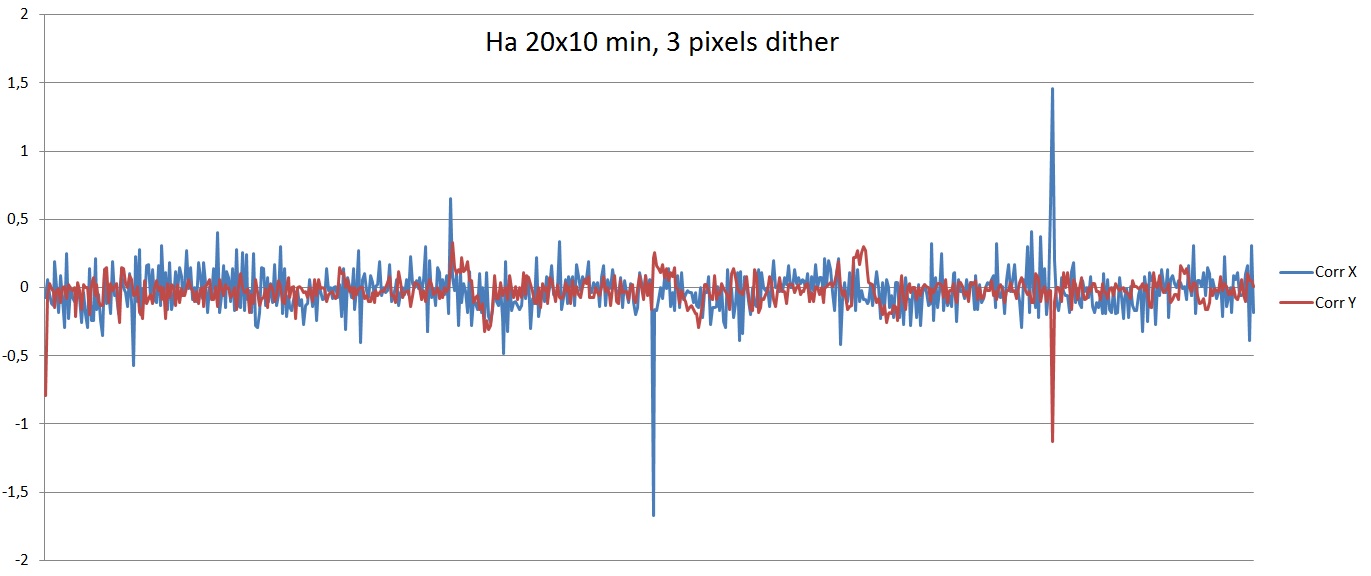
Γεια σας Στη διάρκεια μιας αστροφωτογράφισης πολλαπλών νυχτών αντιμετώπισα ένα πρόβλημα με το autoguiding. Η οδήγηση έγινε με το MaximDL μέσω της ST4 θύρας της στήριξης μου. Την πρώτη βραδιά δεν αντιμετώπισα κανένα πρόβλημα με την αυτόματη οδήγηση. Πήρα 20x10 min λήψεις σε Ha και όλα πήγαν μια χαρά. Είχα ενεργοποιήσει το dithering μεταξύ των λήψεων στα 3 pixels. Βραδιά 1 - λήψεις σε Ha