maxplanck
-
Αναρτήσεις
2126 -
Εντάχθηκε
-
Τελευταία επίσκεψη
Τύπος περιεχομένου
Forum
Λήψεις
Ιστολόγια
Αστροημερολόγιο
Άρθρα
Αστροφωτογραφίες
Store
Αγγελίες
Όλα αναρτήθηκαν από maxplanck
-
Πρώτες εντυπώσεις AUTOGUIDING EQ6SKYSCAN
maxplanck απάντησε στην συζήτηση του/της maxplanck σε Λήψη αστροφωτογραφίας deep sky
1025 δευτερόλεπτα έκθεση με προσοφθάλμιο 8mm στη NIKON! Το autoguide πέτυχε. Το σετάρισμα κάνει και για τις EQ6 και heq5 σύμφωνα με το site.
-
δυσκολη επιλογη
maxplanck απάντησε στην συζήτηση του/της ekstatik σε Η γωνιά των νέων αστροπαρατηρητών
ΗΛΙΑΣ ... ΣΕΛΗΝΙΑΣΜΕΝΟΣ!!! -
Μεγάλα βρέφη γαλαξίες στο νεαρό σύμπαν
maxplanck απάντησε στην συζήτηση του/της arasteo σε Αστρονομία, Αστροφυσική και Κοσμολογία
ΜΗ ΜΠΛΕΚΕΙΣ ΤΟΝ MAX BORN .ΑΠΛΑ ΧΡΗΣΙΜΟΠΟΙΗΣΕ ΠΙΘΑΝΟΤΗΤΕΣ ΓΙΑ ΝΑ ΕΡΜΗΝΕΥΣΕΙ ΦΑΙΝΟΜΕΝΑ ΚΒΑΝΤΙΚΗΣ ΜΗΧΑΝΙΚΗΣ!ΠΗΡΕ ΚΑΙ ΤΟ ΝΟBEL TOY ΤΟ 1954!!! ΘΑ ΤΑ ΠΟΥΜΕ ΣΥΝΤΟΜΑ -
ΤΕΤΛΑΘΙ ΔΗ ΚΑΔΡΙΗ ΚΑΙ ΚΥΝΤΕΡΟΝ ΑΛΛΟΝ ΕΤΛΗΣ!
-
Για ρώτησε τους κ.κ. Σειραδάκη και Αυγολούπη στο Φυσικό Θεσ/νίκης! Μπορούν να σε βοηθήσουν? Είναι καθηγητές.
-
 Φίλε Παναγιώτη η φωτογραφία πάρθηκε με μία "απλή" digital SLR τη NIKOND70 απο τη βεράντα του σπιτιού μου στη Λάρισα! 350 δευτ. έκθεση ISO200 primefocus. Τη δημοσιεύω γιατί μου γκρίνιαξε ο giorgosgr!!!!
Φίλε Παναγιώτη η φωτογραφία πάρθηκε με μία "απλή" digital SLR τη NIKOND70 απο τη βεράντα του σπιτιού μου στη Λάρισα! 350 δευτ. έκθεση ISO200 primefocus. Τη δημοσιεύω γιατί μου γκρίνιαξε ο giorgosgr!!!! -
δυσκολη επιλογη
maxplanck απάντησε στην συζήτηση του/της ekstatik σε Η γωνιά των νέων αστροπαρατηρητών
Ο Παναγιώτης έχει δίκιο.Κανένα τηλε δεν έχει οδηγητικο στον εξοπλισμό του διότι πολύ απλά το οδηγητικό είναι ένα ... τήλε ακόμη!!! Μη συγχέεις το finder με το οδηγητικό. Το πιατάκι της VIXEN μπαίνει στη βάση και πάνω του τα ... δύο τήλε.
-
...KBANTIKA ΣΩΣΤΟ!!!
-
δυσκολη επιλογη
maxplanck απάντησε στην συζήτηση του/της ekstatik σε Η γωνιά των νέων αστροπαρατηρητών
OΧΙ ΟΧΙ ΟΧΙ (κοντεύει η 28 Οκτωβρίου!!!) Μαρσιώτη!!! Δεν ξεχνάμε τον βαθύ ουρανό απο τη πόλη!!! Εγω του προτείνω skywatcher200mm και HEQ5 μαζί με το πιατάκι της VIXEN και ένα απλό οδηγητικό!!! Είναι ακριβώς ό,τι δοκίμασα και δούλεψε!!! Επι τη ευκαιρία , ψάχνω για κανένα καλό και φτηνό οικοπεδάκι στον ... Αρη!!! Εχεις να μου προτείνεις κάτι Ηλία??? -
Ring Nebula, Πρώτη δοκιμή DSI, 20x15sec χωρίς dark fr, Alt/Az
Ο maxplanck σχολίασε σε eliasg2004 για αστροφωτογραφία Νεφελώματα
 "Τρόμαξα να "ξεκοκκινήσω" τον ουρανό " Δούλεψες με channels στο PHOTOSHOP? Ωραία φωτο!
"Τρόμαξα να "ξεκοκκινήσω" τον ουρανό " Δούλεψες με channels στο PHOTOSHOP? Ωραία φωτο! -
Πρώτες εντυπώσεις AUTOGUIDING EQ6SKYSCAN
maxplanck απάντησε στην συζήτηση του/της maxplanck σε Λήψη αστροφωτογραφίας deep sky
672 δευτερολεπτα με διπλασιαστη στη νικον(φτηνό!) Δεν έχει νόημα να παρατείνω τον χρόνο έκθεσης.
-
Επεξεργασία Φωτογραφίας
maxplanck απάντησε στην συζήτηση του/της Salvation σε Επεξεργασία αστροφωτογραφίας deep sky
Ευχαριστω Γιωργη (τόσο για τα καλά σου λόγια! όσο και για την ειλικρινή κριτική σου!!!) Λοιπόν με το χερι στη καρδιά (που λέει και ένας... καρδιολόγος φίλος μου!!!) και μένα με παραξένεψε όταν μού προέκυψε μπλέ!!! Θα μπορούσα να το δεχτώ αν δεν υπήρχε το κόκκινο στον κεντρικό πυρήνα.Τα φωτονια στο ιωδες(λ=400nm περίπου) έχουν μεγαλύτερη ενέργεια απο τα φωτονια στο ερυθρό (λ=700nm περίπου!) Αρα στη φωτό μου, παρουσιάζεται το εξης παράδοξο : ψυχρότερες εσωτερικές περιοχές απο τις αντίστοιχες εξωτερικές!!! Η κβαντική οπτική με στέλνει πίσω λοιπον, για δεύτερη επεξεργασία!!! Ελπίζω να σου άρεσε η αυτοκριτική μου!!! Σαν νέος όμως στό ... άθλημα (ασχολόυμαι μόνο 2 χρόνια) συγχωρούμαι και για κανένα λαθάκι , έτσι δεν είναι φίλε μου??? -
Επεξεργασία Φωτογραφίας
maxplanck απάντησε στην συζήτηση του/της Salvation σε Επεξεργασία αστροφωτογραφίας deep sky
Κι αυτή είναι φωτογραφία!
-
Επεξεργασία Φωτογραφίας
maxplanck απάντησε στην συζήτηση του/της Salvation σε Επεξεργασία αστροφωτογραφίας deep sky
Αυτή είναι αηδία.
-
Επεξεργασία Φωτογραφίας
maxplanck απάντησε στην συζήτηση του/της Salvation σε Επεξεργασία αστροφωτογραφίας deep sky
Αυτή είναι η πρωτότυπη.
-
Πρώτες εντυπώσεις AUTOGUIDING EQ6SKYSCAN
maxplanck απάντησε στην συζήτηση του/της maxplanck σε Λήψη αστροφωτογραφίας deep sky
693 SECOND! ΣΤΑΜΑΤΩ ΓΙΑ ΛΟΓΟΥΣ ΦΩΤΟΡΥΠΑΝΣΗΣ!
-
693 sec AUTOGUIDE
Ο maxplanck σχολίασε σε maxplanck για αστροφωτογραφία Διάφορες αστρονομικές φωτογραφίες
 Αρα στο θέμα κυρίας εστίας : O.K. !!!
Αρα στο θέμα κυρίας εστίας : O.K. !!! -
693 sec AUTOGUIDE
Ο maxplanck σχολίασε σε maxplanck για αστροφωτογραφία Διάφορες αστρονομικές φωτογραφίες
ΨΗΦΙΑΚΗ ΜΗΧΑΝΗ-ISO200-20 ΠΡΟΣΟΦΘΑΛΜΙΟΣ ΣΕ 1000ΜΜ ΤΗΛΕ-ΠΟΣΟ ΘΑ ΧΡΕΙΑΣΤΕΙ ΕΝΑ MESSIER 9.00? -
693 sec AUTOGUIDE
Ο maxplanck σχολίασε σε maxplanck για αστροφωτογραφία Διάφορες αστρονομικές φωτογραφίες
ΔΕΝ ΦΑΙΝΕΤΑΙ ΝΑ ΥΠΑΡΧΕΙ ΠΡΟΒΛΗΜΑ ΧΡΟΝΟΥ(ΓΙΑ PRIME FOCUS!) ΣΤΑΜΑΤΑΩ ΓΙΑ ΝΑ ΜΗΝ ΑΣΠΡΙΣΕΙ(!) Η ΦΩΤΟ.ΟΣΟ ΓΙΑ ΤΗΝ ΕΦΑΡΜΟΓΗ ΕΧΕΙΣ ΑΠΟΛΥΤΟ ΔΙΚΙΟ!ΕΤΟΙΜΑΖΟΜΑΙ ΓΙΑ ΚΑΝΕΝΑ ΜESSIER! -
-
 ΜΠΡΑΒΟ ΓΙΩΡΓΗ!!!
ΜΠΡΑΒΟ ΓΙΩΡΓΗ!!! -
Άρης, 15 Οκτωβρίου 2005, 01:00 Θ.ω.Ε.
Ο maxplanck σχολίασε σε Ηλίας Χασιώτης για αστροφωτογραφία Άρης
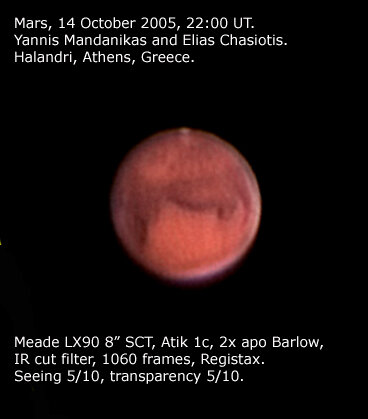 Ηλίας Mars-ιώτης ??? Ποιός είναι πάλι αυτός???Καινούργιο μέλος??? Καλώς ήρθες φίλε!!!
Ηλίας Mars-ιώτης ??? Ποιός είναι πάλι αυτός???Καινούργιο μέλος??? Καλώς ήρθες φίλε!!! -
Πρώτες εντυπώσεις AUTOGUIDING EQ6SKYSCAN
maxplanck δημοσίευσε μια συζήτηση σε Λήψη αστροφωτογραφίας deep sky
Γειά σας φίλοι Λοιπόν επι της ουσίας: 1)Η eq6 συνδέθηκε με τον η/υ με τη βοήθεια του αντάπτορα της SHOESTRING.Απλή και έξυπνη κατασκευή με οπτοζεύκτες. Η webcam PHILIPS TOUCAM 840 σε USB και φυσικά το guidedog 2)Oδηγούσε η PHILIPS προσαρμοσμένη στο skywatcher200mm χωρίς barlow και ήλεγχα εγώ μέσα απο το skywatcher80ed (80/600) με τη βοήθεια φωτεινού σταυρονήματος και διπλού barlow(4x) 3)Εχοντας ήδη κατεβάσει τη βοήθεια για το guidedog σε pdf αρχεία , έκανα(λίγο βιαστικά)τις πρώτες ρυθμίσεις και προχώρησα.Αρχικά δεν ενθουσιάστηκα(μάλλον ψιλοαπογοητεύτηκα!) Πάλι στη βοήθεια, νέες ρυθμίσεις et voila! 4)Γιά 20 περίπου λεπτά το σύστημα είχε κλειδώσει και μάλιστα δεν έδειχνε να ενοχλείται όταν κάποιο περαστικό σύννεφο εμπόδιζε τη webcam! 5)Προχωρώ σε πρώτη φωτό με τη nikond70 primefocus στο 80ed. Διακόπτω λόγω ανυπομονησίας στα 175 δευτ. τη βλέπω στον υπολογιστή, ενθουσιάζομαι και σας τη στέλνω! Επαναλαμβάνω διαδοχικές λήψεις σταματώντας πάλι απο βιασύνη στα 300 δευτ. χωρίς ορατό πρόβλημα(φωτο που παραθέτω). Δεν προχωρούσα παραπάνω διότι είχα υπερέκθεση(το φεγγαράκι βλέπετε!) 6)Ολα καλά μέχρι εδώ,βάζω τη web στο 80ed και τη νικον στο 200αρι. Εξαιτίας το διπλού barlow(κακής ποιότητας) δεν επιτυγχάνω σημειακό είδωλο σκόπευσης(οπερ βασικότατο!) οπότε και η ακρίβεια οδήγησης μειώνεται.Βγαίνουν καλές αλλά όχι τέλειοι κύκλοι!!!!!!!!! 7)Αρα σε πρώτη φάση είμαι να : α)βελτιώνω το ζύγισμα της βάσης δεδομένου οτι έγινε πληθώρα ανακατατάξεων β)ρυθμίζω τα pixel σκόπευσης γ)εισάγω πιο ολοκληρωμένα τα στοιχεία της βάσης στο guidedog δ)ρυθμίζω στο guide τους χρόνους διόρθωσης, τα ποσοστά σφάλματος που θα επεμβαίνει,το backlash,την οριζοντίωση του δικού του φωτεινού σταυρονήματος(!!!) και άλλα πολλά ε)αγοράζω έναν βαρβάτο barlow!!! στ)προσεύχομαι για καθαρό ουρανο!!! η)κάθομαι και σκέφτομαι!!! ΠΗΓΑ ΛΙΓΟ ΒΙΑΣΤΙΚΑ ΦΙΛΟΙ ,ΑΛΛΑ ΑΞΙΖΕ ΤΟΝ ΚΟΠΟ!!! ΣΥΓΓΝΩΜΗ ΑΝ ΣΑΣ ΖΑΛΙΣΑ
-
 Πολύ σωστά!Πρόκειται γιά τη πρώτη απο τις φωτό που έβγαλα. Αναλυτικές (πρώτες) εντυπώσεις θα δημοσιεύσω σε λίγο.Ευχαριστώ πολύ κ.Ηλιόπουλε!
Πολύ σωστά!Πρόκειται γιά τη πρώτη απο τις φωτό που έβγαλα. Αναλυτικές (πρώτες) εντυπώσεις θα δημοσιεύσω σε λίγο.Ευχαριστώ πολύ κ.Ηλιόπουλε! -
174 ήσυχα δευτ/τα με autoguiding Οδηγει skywatcher200mm, φωτ/ζει skywatcher80ED με NIKOND70.ΜΕ (ΑΖΥΓΙΣΤΗ) ΒΑΣΗ EQ6SKYSCAN