roryt
-
Αναρτήσεις
4273 -
Εντάχθηκε
-
Τελευταία επίσκεψη
-
Ημέρες που κέρδισε
22
Τύπος περιεχομένου
Forum
Λήψεις
Ιστολόγια
Αστροημερολόγιο
Άρθρα
Αστροφωτογραφίες
Store
Αγγελίες
Όλα αναρτήθηκαν από roryt
-

Vixen Polarie star tracker
roryt απάντησε στην συζήτηση του/της Andreas72 σε Αστροφωτογράφηση ευρέος πεδίου
Ελα βρε Αντρεα, ενα κουτακι με ενα βηματικο (νομιζω ΜΤ1 ; ) , ενα απλο χειριστηριο (SD1 ; ) και ενα worm gear , τι ; 2.3 ιντσες ; Τι θα βαλεις πανω του ; 1.5 κιλό DSLR ; Και στην τιμη ΔΕΝ περιλαμβανεται polarscope, τριποδας κλπ ; Γενικα στο χωρο των φορητων μικρων βασεων ΙΜΗΟ πεφτει πολυ φουμαρο ή/και πολύ υπερτιμηση (astrotrac, vixen photo guider, skymemo, losmandy StarLapse, cd1-πως-την-λεγανε-αυτην, κλπ κλπ). Πιστευω μονο οι takahashi ειναι καλες σε αυτην την κατηγορια αλλα πανακριβες. Το ιδιο και η vixen photo guider, αλλα οι τιμη της ειναι απαραδεκτη. 1000 φορες καλυτερα μια μεταχειρισμενη SP ή GP σε κοντο, ελαφρυ, τριποδα με διπλα μοτερ. Δεν θες διπλά μοτερ και DEC και autoguiding ; Ξεβιδωσε τον DEC και κανε πολυ καλη πολικη και δουλεψε μονο με το RA στα μισα κιλα, αλλα με απειρως περισσοτερες δυνατοτητες (πχ PEC αλλα και οδηγηση μονο στο RA). Και αμα λαχει, βαζεις και ενα AT65Q με CCD και τροχο, να κανεις και σοβαρη δουλεια. (*) Θες ακομη καλυτερα ; ψαξε στα μεταχειρισμενα για ΤΗΝ φορητη βαση wide αστροφωτογραφισης : Byers CamTrak, 359 δοντια σε byers worm gear 5 inch , 5 κιλα οφελιμο, και φημολογουμενο PE < 10 arcs και 10-15 λεπτα unguided με 200mm φακο !!!. Σταματησε να την βγαζει καπου 20 χρονια τωρα, τον εχω ρωτησει δεν του εχει μηνει ουτε ενα κομματι απο τα μισα των 90ς, ουτε ο Radosevich που την εφιαχνε εχει καμία, προσπαθω να βρω καιρο τωρα μια και οσοι εχουν πινουν νερο σε αυτην και οταν τους λεω αν μου πουλανε μου λενε "πριτς" - αν βρεις καμια σφυρα μου -
 Φωτιες το ATQ !! Αντε να φυσαμε ολοι μαζι, μπας και καθαρισει Φουυυυυ, φουυυυυ, Αλκυωνίδες ητανε αυτες ;
Φωτιες το ATQ !! Αντε να φυσαμε ολοι μαζι, μπας και καθαρισει Φουυυυυ, φουυυυυ, Αλκυωνίδες ητανε αυτες ; -
 Που πατε και τα βρισκετε !! Μπραβο Βασιλη !
Που πατε και τα βρισκετε !! Μπραβο Βασιλη ! -
Bubble Nebula Ngc7635 και η γειτονιά του.. (halrgb Last Version)
Ο roryt σχολίασε σε ikoms για αστροφωτογραφία Νεφελώματα
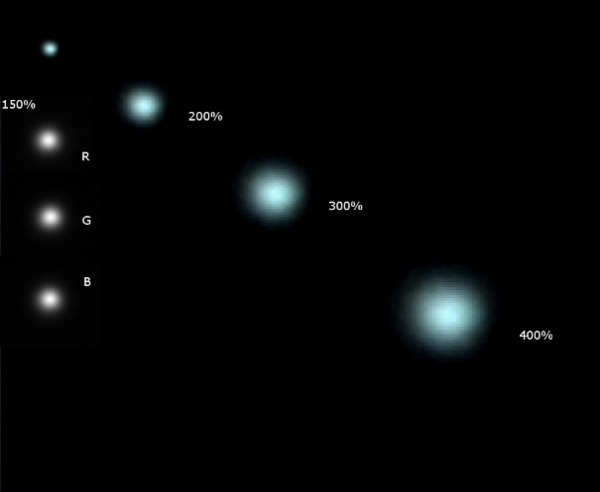
 Δεν εχει τα εντονα κιτρινα, αλλα ο Αγγελος αναφερεται στην ζωντανοτητα των χρωματων. Στην αλλη φαινονταν ποιο "ζωντανά". Εγω θα προτιμήσω αυτην ομως, οντως το διαγραμμα δειχνει ποιο "σωστό". Το κόλπο με αυτες τις φωτογραφιες ειναι να τις απολαμβανεις σε μεγαλη μεγενθυνση (400Χ) , εκει φαινεται καθαρα οτι εχεις πολύ καλή ποιοτητα στις λήψεις σου Γιαννη. Καλή συνεχεια
Δεν εχει τα εντονα κιτρινα, αλλα ο Αγγελος αναφερεται στην ζωντανοτητα των χρωματων. Στην αλλη φαινονταν ποιο "ζωντανά". Εγω θα προτιμήσω αυτην ομως, οντως το διαγραμμα δειχνει ποιο "σωστό". Το κόλπο με αυτες τις φωτογραφιες ειναι να τις απολαμβανεις σε μεγαλη μεγενθυνση (400Χ) , εκει φαινεται καθαρα οτι εχεις πολύ καλή ποιοτητα στις λήψεις σου Γιαννη. Καλή συνεχεια -
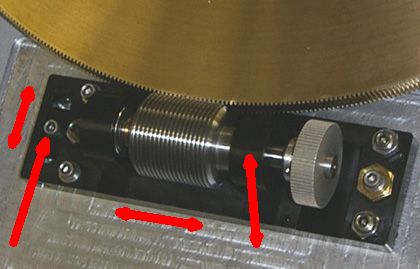
Σε ζηλευω, μακάρι να πιαναν τα χερια μου και εμενα ετσι με τα μηχανικά. Αλήθεια απο τι υλικό ειναι φιαγμενα γραναζι και ατερμονας ; Φανταζομαι οτι το worm ειναι ταιριασμενο με το worm gear, aλλιως μικρο-διαφορες στα δοντια θα φανουνε στο tracking αυξανοντας το περιοδικο λάθος και δυσκολευοντας την οδήγηση. Αν δεν ειναι ταιριασμενα απο τον τορνο, μπορεις να βαλεις μια παστα λιανσης με δομή μικρομετρου (δεν θυμαμαι πως την λενε, φανταζομαι πως ξερεις για ποια λεω, αλλιως θα το βρουμε το Ιντερνετ) και να βαλεις γραναζι-ατερμονα να φερουν μπολικες βολτες, με ενα τρυπανι να γυρναει τον ατερμονα, μεχρι να λειανθουν ("στρωσουν") τα δοντια με τον ατερμονα. Προσοχη να δωσεις επισης στα ρουλεμαν του worm και γενικά στο πως θα στηριχτει μαζι με το τροχο. Θελεις ενα τροπο να μικρορυθμίζεις την θεση του worm στις τρεις διαστασεις. Τοσο για το backlash, οσο για το τζόγο που θα εχει σε σχεση με τα ρουλεμαν και την θεση του στο gear, οσο και το ποσο κεντραρισμενο ειναι το worm πανω στο gear, για να μην "καβαλανε" τα δοντια του worm κατα την αλαγη κατευθυνσης. Μπορει να φενονται περιεργα αυτα που λεω, αλλα σε ταχυτητες tracking και οδηγησης (1 με 2 Χ sidereal rate) βγαινουν προβληματα που καλως εχοντων, με μεγαλυτερες ταχυτητες, δεν φαινονται. Βacklash, καβαλημα δοντιων μεχρι να υπερπηδηθει η στατικη τριβη, τζόγος στον αξονα του worm που μοιαζει με backlash. Δες την φωτο απο κατω απο το worm της Mathis, εχω βαλει βελακια με ποιους τροπους θα πρεπει να μπορεις να ρυθμισεις τον αξονα του worm. Υποψην, μαζι με την ποιοτητα κατασκευης του gear, ειναι απο τα ποιο σημαντικα στοιχεια της κατασκευης σου. Καλή συνεχεια !! Κρατα μας ενημερους !! Ειναι πολύ ενδιαφερον project και ευχομαι ολοψυχα να βγει κατι πολυ καλο. ΥΓ κατι αλλο για το βαρος, οπου σε περνει (πχ στα κλυματα ή στο wedge) χρησιμοποιησε ελαφρυτερο υλικο, πχ αλουμινιο, χωρις ομως να θυσιασεις την μηχανική στιβαροτητα της βασης.

-
Στα γρηγορα γιατι δεν εχω χρονο τωρα : δες τους υπολογισμους πχ απο το site του Bartels , εχω την εντυπωση οτι οσο ευελικτος και να ειναι ενας ελεκτης βηματικου, προτιμουνται καποιοι λογοι μειωσης (αρα και αριθμοι δοντιων) γιατι ειναι ποιο ευκολο να υλοποιηθει το siderial rate με ακριβεια
-
Σε εχω χασει. Υποθετοντας οτι εχεις μονο ατερμονα (αλήθεια, τους εφιαξες τους ατερμονες ; ) αρα οσα δοντια τοσο λογο μειωσης, εχεις 268 Χ 76 = 20368 και οχι 16821 Αναρωτιεμαι γιατι δεν εχει βαλει κανεις δυο worm gears οπως λες να το κανεις, μηπως υπαρχει πχ προβλημα υπερπηδησης της στατικης τριβης οταν ειναι σε ηρεμια ; και πως θα συμπεριφερθουν σε αλλαγη κατευθυνσης ; κανεις μηχανικος / φυσικος να μας διαφωτισει ;
-
Ο Κωστας εχει απολυτο δικιο, ειναι αυτες οι λεπτομερειες που κανουν την διαφορα - αλλο να ειναι μαζεμενα τα καλωδια μεσα στο σωμα της βασης, αλλά AP Mach1, και αλλο να κρεμονται σκορπια απο εξω. Σε ενα συντηριτικο εξοπλισμο αστροφωτογραφησης αυτο γινεται συντομα καλό προβλημα! Επισης να σου βαλω μερικά ακομη ερωτηματα για σκεψη : τι θα κανεις για wedge ? Αυτο που εχω δει προσφατα και με εχει εντυπωσιασει σαν κατι στιβαρο αλλα που μπορει να φιαχτει και απο ερασιτεχνη ειναι αυτο : http://stargazerslounge.com/member-equipment-reviews/154057-kson-eklipse-advanced-goto-mount.html (οχι η βαση, το wedge της, καπου στην μεση, που την δειχνει πανω του). Στηριξη, πολύ σημαντικο. Εγω θα εφιαχνα φωρητο πυλωνα, αλλα και ενας τριποδας (πιθανων ξυλινος ; ) ειναι καλή λυση. Πρεπει να ειναι στιβαρη η στηριξη και να αποσβαινει πολυ γρηγορα τις ταλαντωσεις, αλλιως χανεις μεγαλο μερος απο τα οποια ατου της κατασκευης σου Και κατι που ειναι μονο για αστροφωτογραφηση και ισως μονο για "τεμπεληδες" σαν εμενα : meridian flip. Αν προσεξεις, απο σχεδιασμου της η ισημερινη βαση τυπου γερμανικής (GEM) εχει 2 κατα : ενα δεν μπορεις να στοχευσεις στον Πολικο (καλα, τιποτα το σπουδαιο) και δευτερο, οταν στοχευεις προς το ζενιθ, οταν ο στοχος περασει το meridian (και ισως μετα απο μερικες μοιρες ποιο εκει) πρεπει να σταματησεις, να γυρισεις τον αξονα απο την αλλη μερια του πυλωνα/τριποδα και να συνεχισεις απο εκει. Αυτο λεγεται meridian flip και εμενα με σπαει αγρια. Η ολη διαδικασια, ακομη και αυτοματοποιημενη με ηλεκτρονικα, περνει πολυτιμο χρονο, με τον στοχο στο καλυτερο σημειο του ουρανου (ζενιθ). Οι βασεις με πιρουνι στο DEC (οπως στα SCT) δεν εχουν αυτα τα "προβληματα" και δεν χρειαζονται (τόσο) τα αντιβαρα. Αλλα μπορουν να γινουν ποιο ασταθεις αν δεν προσεξεις, θελουν αλλου ειδους ζυγισματα, εχουν ανοιγμα συνηθως για συγκεκριμενη ΟΤΑ. Αν δεις οι Mathis Instruments, που εδωσα ποιο πανω link, εχουν ιδιο αξονα στο RA (αυτο δεν αλλαζει), και αναλογα τι θες σου βαζουν ειτε αξονα DEC με αντιβαρα, ειτε πηρουνι. Ενα αλλο κολπο χωρις πηρουνι, που το εχω δει μονο στο μεγαλο μοντελο της ASA και το δινει εξτρα η Astrophysics για τις πολυ μεγαλες της, ειναι το astrographic pier, δηλαδη η στηριξη να μην ειναι ακριβως απο κατω απο την κεφαλή, αλλα πλαγιασμενη, ετσι ωστε η ΟΤΑ/μοτερ/CCD κλπ να μην "βρισκουν" στον πυλωνα (φυσικα καταλαβαινεις τι προβληματα σταθεροτητας εχει αυτο αν δεν ειναι χοντρο, οποτε κανει μαλλον για μονιμο παρατηρητηριο μονο). (ναι μου αρεσει αυτο το project ) Astrographic Pier
-
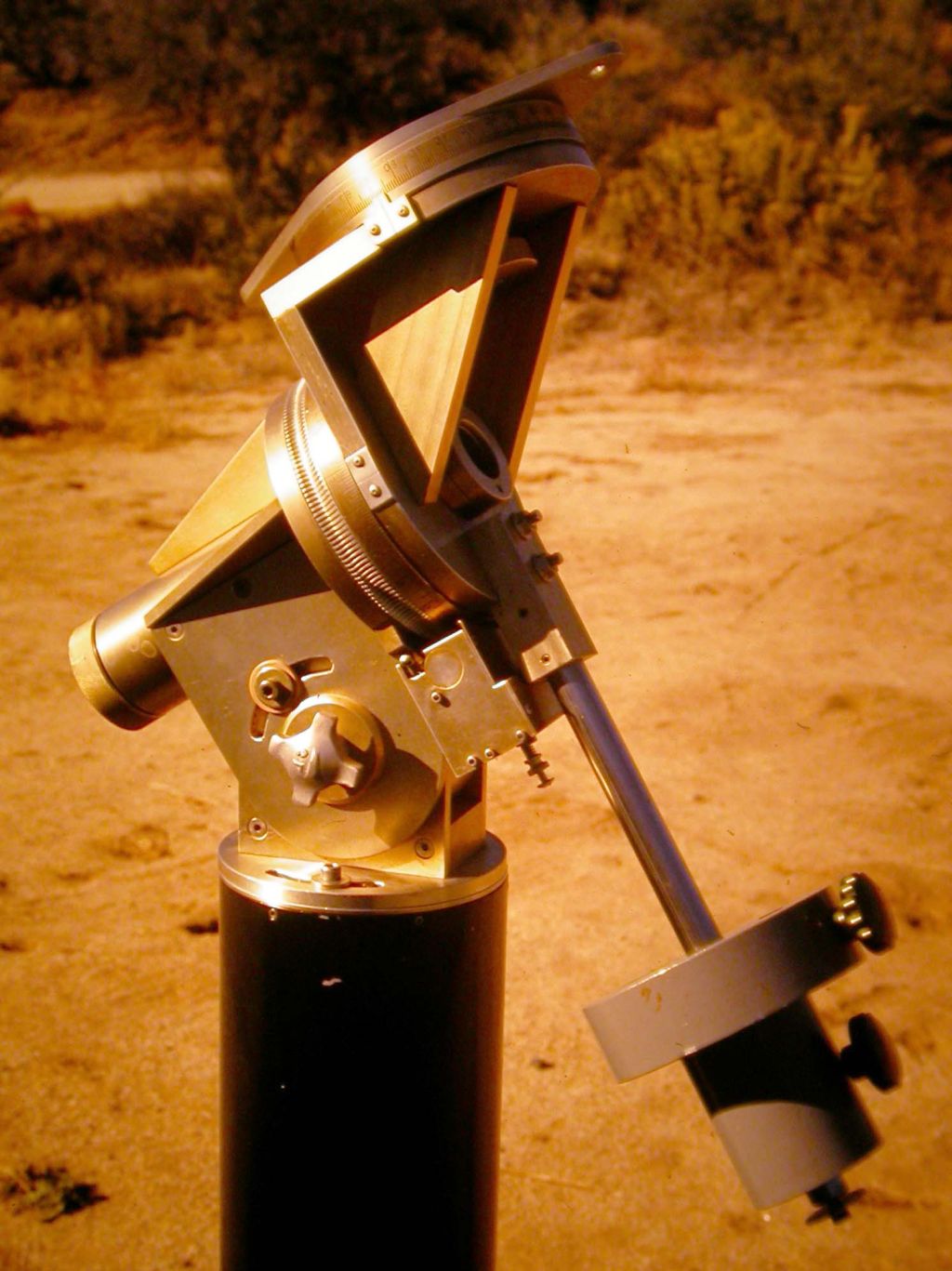
Κουφιοι αξονες. Αν δεις και αυτη που λες εχει τρυπα στον RA για Polarscope, και οι αντοχες/ανοχες δεν επιρεαζονται αισθητα με κουφιους. Δεν εχεις μεγαλες στροφες, μια στροφη την ημερα κανουν. Επισης ο αξονας του DEC μπορει να ειναι κοντος, κοιτα αυτη που εχω ανεβασει, ο τυπος εχει βαλει τον αξονα των αντιβαρων ξεχωρο και εκτος αξονα DEC και αυτο του προσφερει και την δυνατοτητα να εχει χαμηλες ροπες σε αυτον το αξονα. Αν υπολογισεις οτι στο DEC δεν εχεις συνεχη κινηση (οπως εχεις στο RA) το μοτερ/αξονας πρεπει να υπερβει την στατικη τριβη, και εκει αρχιζουν τα παρατραγουδα. Κοιτα τι κανει αυτος, το DEC εχει ελαχιστο αξονα που δεν εχει σχεση με τα αντιβαρα : τα αντιβαρα δεν περιστρεφονται μαζι του. Και ο αξονας κοντος και οι ροπες λιγες (διαβασε το PDF που σου ειχα στηλει που την εχει μεσα συτην, εξηγει πολλές απο τις λεπτομερειες της, οπως πχ γιατι εχει βαλει τριγωνικα "αυτια" παραλληλα με τον αξονα του RA)
-
11 κιλά άξονας ; Πολλά δεν ειναι ; Καντους ποιο κοντους. Και πρεπει να κανεις προβλεψη για polarscope, οποτε ο RA καλο ειναι να ειναι κουφιος (ισως και ο DEC ? ) Δεν ειναι υποχρεωτικό να βαλεις το "κλασσικο" σχημα με ενα μακρυ αξονα, απο την μια το μοτερ απο την αλλη το τηλεσκοπιο. Κοιτ αεδω πως το κανουν με κοντους αξονες : http://www.mathis-instruments.com/ Και νομίζω αυτην την φωτογραφία στην εχω στηλει ; ειναι ενα πολύ καλό παραδειγμα πως μπορει να βγει κατι σουπερ και φορητο
-
Μανουσο, μην τον μπλεκεις απο τωρα τον ανθρωπο με encoders, δεν ειναι υποχρεωτικο να τους βαλει, ουτε φυσικα απο την αρχη. Αστον να φιαξει μια καλη μηχανικη κατασκευη και τα ηλεκτρονικα υπαρχουν (κατα το λεφτα υπαρχουν ) Βαλε μεσα και το βαρος τριποδα/πυλωνα, χμμμμμ Βαρια μου φενεται να βγαινει, ειναι πολλα τα κιλα. Αν την θελεις για φορητη πρεπει να σκεφτεις τι συμβιβασμους θα κανεις. Δεν μπορεις να εχεις ευκολα και φορητωτητα και 70 κιλα εξοπλισμο Ποσο ειναι το συνολο των κιλών που υπολογιζεις ;
-
Και κατι αλλο, αντι για να φιαξεις και το χειριστηριο του βηματικου μονος σου (ειναι ολοκληρη ιστορια και αυτο), υπαρχουν μερικά ετοιμα : το autostar της Meade μπορει να προσαρμωστει και πολλοι το εχουν ηδη κανει (αλλα εκει θα περιοριστεις να χρησιμοποιεις τα μοτερ της) Το litlefoot που χρησιμοποιω εγω ειναι αρκετα ευελικτο και μπορει να υποστηριξει οποιον βηματικο και οποιο συνδιασμο γραναζιων (αν και εχει γινει ποια δυσευρετο). Υπαρχει το συστημα του Mel Bartels (κανει παπαδες αλλα ειναι με software για DOS , δεν λεει, ιδιως οταν τα παντα ζητανε υποστηριξη για ascom σημερα) Υπαρχουν και 1-2 ακομη, οπως το gotonova που χρησιμοποιησε και η iOptron και κανα δυο ευρωπαικά. Φτασει εκει τα τα ξαναλέμε.
-
Ααα, τωρα καταλαβα. Θα βαλεις δυο worm gears ανα άξονα. Συνηθως ειναι ενα και απο εκει και περα αν χρειαζεται αλλη μειωση την κανουν με spur gears. Φανταζομαι για λόγους κοστους, και γιατι το φρενο το εχουν ηδη υλοποιησει με το πρωτο ατερμονα και μονο. Προσοχη στο backlash !!! Προσοχη στην συνδεση βηματικου με πρωτο worm. Απο συμπλεκτη τι θα κανεις ; (και για να εχεις ενα τροπο απο-εμπλοκης απο το μοτερ για χειροκινητη λειτουργια και για ασφαλεια κινητηρα/γραναζιων) 16821:1 δεν ειναι αργο. Για να σου δωσω ενα μετρο συγκρισης, οι Vixen ειναι 144χ120 = 17280:1 Οι EQ5 νομιζω ειναι (απο μνημης αυτο) 120χ100 = 12000:1 Με τον δικο μου χειριστηριο (littlefoot) που παρεχει μονο 500mA στον βηματικο, και με το βαρος που βαζω στην συγκεκριμενη βαση (καπου 10 κιλα σε vixen gpd2), μπορω να πετυχω ταχυτητα goto μεχρι Χ20 , το πολύ Χ25. Με αλλο κυκλωμα που μπορει να δωσει περισσοτερο ρευμα, και διαφορετικη βαση/φορτιο/ζυγισμα μπορεις να πας και σε πολύ μεγαλυτερες ταχυτητες (αν και για φωτογραφηση αυτα δεν ειναι και τοσο κρισημα, το tracking να ειναι ακριβειας, και το goto ας ειναι και λιγο αργο). Εχεις υπολογισει συνολικά κιλα που θα ζυγιζει ; θα ειναι φορητη; Αληθεια, δεν αλαζεις το subject ; αυτο που πας να φιαξεις ειναι paramount, οχι EQ5
-
 Δεν αφηνεις τις Χα-μαϊμουδες να βγαλεις κανενα αυθεντικό NB λεω εγω ; τωρα δεν εχεις δικαιολογιες, πολλα βραδια σε ενα στοχο !!
Δεν αφηνεις τις Χα-μαϊμουδες να βγαλεις κανενα αυθεντικό NB λεω εγω ; τωρα δεν εχεις δικαιολογιες, πολλα βραδια σε ενα στοχο !! -
 Για αλλη μια φορα συγχαρητηρια, καταφερνεις μικρα θαυματα με αυτον το φακο
Για αλλη μια φορα συγχαρητηρια, καταφερνεις μικρα θαυματα με αυτον το φακο -
Orion & Horse Nebula Widefield (halrgb)
Ο roryt σχολίασε σε Aggelos Kechagias για αστροφωτογραφία Νεφελώματα
 Καταπληκτικό το wide Αγγελε, οντως εβαλες μεσα οτι εχει και δεν εχει εκει περα
Καταπληκτικό το wide Αγγελε, οντως εβαλες μεσα οτι εχει και δεν εχει εκει περα -
 Ειναι πολύ δυσκολος στόχος και για αυτο και μονο μπραβο ! Καλή συνεχεια
Ειναι πολύ δυσκολος στόχος και για αυτο και μονο μπραβο ! Καλή συνεχεια -
 Μπραβο Βασιλη, πολύ ομορφο
Μπραβο Βασιλη, πολύ ομορφο -
Το μεγαλο ειναι 6.8 " και ειναι ικανό για RA βάσης επιπεδου paramount και κανένα RC10" - θα εξαρτηθει φυσικά και απο τα ρουλεμαν και τον αξονα, εδω ο κανόνας ειναι οσο ποιο "χοντρό" τοσο ποιο καλά, πχ βλέπεις να βαζουν αξονες 1.5 με 2" διαμετρο. Αυτα τοσο για το βαρος που θα μπορει να σηκωσει αλλα και για τους κραδασμους. Κοντο αξονα οσο γινεται, καλό wedge και βαση (τρίποδα ή καλυτερα πυλωνα). Το μικρο worm wheel ειναι 1.6" και αν το προορίζεις για το DEC θα σου ελεγα να το ξανασκεφτεις, δεν ειναι του ίδιου επιπεδου. Θες τουλαχιστον 5" στο DEC για να ειναι ισαξιο. Αλήθεια για συμπλέκτη τι θα κανεις ; Αν καταλαβα απο τους υπολογισμους για τα microsteps (ειναι και αργα το βραδυ και δεν παιρνει στροφες εύκολα ), με 51200 βήματα ανα στροφή εχεις 0.00703125 μοιρες το βήμα; Ενας κλασσικός βηματικός ειναι 7 μοιρες το βημα, αρα θα χρειαστεις μειωτηρα 1:1000 πριν το worm ; Κατι μου διαφευγει. Σε αυτην την περίπτωση δεν θα ειναι καπως αργο το slew (goto) από στοχο σε στόχο ; Εχεις εκεινο το περισσεμα 0.00003125 μοιρες αλλα αυτο φανταζομαι θα ειναι αμελητεο και ευκολα διορθωσιμο απο την οδήγηση (παντα για φωτογραφηση, στην παρατηρηση ολλα αυτα ειναι ψηλά γραμματα). Επισης προσοχη στην ακριβεια με την οποια θα τοποθετησεις τους δυο αξονες κάθετα μεταξύ τους, θα σε γλυτωσει απο πολλούς μπελαδες σχετιζομενους με την ακριβεια στο goto. Πολύ ενδιαφερον project και χαρας το κουραγιο σου. Πορωθηκα και εγω και προχωραω να σχεδιασω στον υπολογιστη αυτο που εχω στο μυαλό μου εδω και πολυ καιρο
-
Ωωω, εισαι πραγματι μαστωρας !! Ποσα δοντια/διαμετρος κλπ; Και φανταζομαι οτι εφιαξες και τα worm ταιριασμένα ; Ανυπομονω να δω τις επιδωσεις τους στην πράξη, τα καλά worm wheel σπανίζουν (και κοστίζουν ) (και μιας και πηρες φορα πειραζει να σε αγκαζαρω να μου φιαξεις και εμενα 1-2 ; )
-
 Γιάννη, ενω μου αρεσει κατι μου καθεται ασχημα στα αστερια που βγηκαν "χρυσα". Σαν να σου ξεφυγε λιγο παραπάνω στο saturation ; Αλήθεια, το script του SilverCup το ξερεις ; http://pixinsight.com/forum/index.php?topic=3446.0 (φυσικα τα συγχαρητηρια ειναι δεδομενα)
Γιάννη, ενω μου αρεσει κατι μου καθεται ασχημα στα αστερια που βγηκαν "χρυσα". Σαν να σου ξεφυγε λιγο παραπάνω στο saturation ; Αλήθεια, το script του SilverCup το ξερεις ; http://pixinsight.com/forum/index.php?topic=3446.0 (φυσικα τα συγχαρητηρια ειναι δεδομενα) -
ΤΡΥΠΙΟΣ ΒΡΑΧΟΣ ΚΑΙ ΜΕΓΑΣ ΑΛΕΞΑΝΔΡΟΣ
Ο roryt σχολίασε σε stavrakis για αστροφωτογραφία Πορτρέτα του ουρανού
 Πολύ όμορφη, μπράβο
Πολύ όμορφη, μπράβο -
 Θεμη καταλαβαίνω αυτο που λες για τα φλατ, εχει κανει ζημια στο υπόβραθρο. Ισως αν κανεις DBE στο pix (σε linear stage παντα) με πιθανό θυμα το ΙΧ, αλλα ισως ετσι θα σου επιτρεψει να ανεβασεις απροβληματιστα το saturation για να φανουν τα κοκκινα στους πυρηνες (που εχει μπολικο πράγμα που δεν εχει βγει εξω) ; Εχεις πιασει καλή λεπτομερεια. (αντε και καλως να ερθει η καινουργια)
Θεμη καταλαβαίνω αυτο που λες για τα φλατ, εχει κανει ζημια στο υπόβραθρο. Ισως αν κανεις DBE στο pix (σε linear stage παντα) με πιθανό θυμα το ΙΧ, αλλα ισως ετσι θα σου επιτρεψει να ανεβασεις απροβληματιστα το saturation για να φανουν τα κοκκινα στους πυρηνες (που εχει μπολικο πράγμα που δεν εχει βγει εξω) ; Εχεις πιασει καλή λεπτομερεια. (αντε και καλως να ερθει η καινουργια) -
 Δεν τα θάβουν αυτα Γρηγόρη Μπράβο
Δεν τα θάβουν αυτα Γρηγόρη Μπράβο -
Fireball Baby, Fireball!! Παντοκράτωρ Κέρκυρα - Gif
Ο roryt σχολίασε σε Bi2L για αστροφωτογραφία Διάττοντες
 Καλα, καταπληκτικό! Μαγεία Βασιλη, χαρά στην υπομονή σου.
Καλα, καταπληκτικό! Μαγεία Βασιλη, χαρά στην υπομονή σου.