Μανούσος
-
Αναρτήσεις
2160 -
Εντάχθηκε
-
Τελευταία επίσκεψη
Τύπος περιεχομένου
Forum
Λήψεις
Ιστολόγια
Αστροημερολόγιο
Άρθρα
Αστροφωτογραφίες
Store
Αγγελίες
Όλα αναρτήθηκαν από Μανούσος
-
Πωπωωωω, τώρα είδα το ποστ!! Συγχαρητήρια για την κατασκευή. Φαντάζομαι ότι η στήριξη προορίζεται για αστροφωτογράφηση έτσι; Με το θέμα των encoders έχεις σκεφτεί κάποια λύση; Σκέφτεσαι να βάλεις optical encoders; Τα ηλεκτρονικά του συστήματος πώς θα είναι; Θα χρησιμοποιήσεις κάτι έτοιμο (Autostar) ή θα φτιάξεις κάτι δικό σου; Πολλές οι ερωτήσεις ε; Ρωτάω γιατί είμαι κι εγώ σε φάση κατασκευής ενός συστήματος αλλά για Dob στηρίξεις (http://www.astrovox.gr/forum/viewtopic.php?t=15802). Καλή επιτυχία!!!
-

Eridanus globular cluster
Μανούσος απάντησε στην συζήτηση του/της planetman σε Παρατήρηση Βαθύ Ουρανού
Το μέρος που πήγαμε Νότια του Ηρακλείου φαίνεται να είναι μια καλή εναλλακτική τώρα το χειμώνα. Δεν υπάρχει φωτορύπανση από το Ηράκλειο, ο αέρας φαίνεται να κόβει σε εκείνο το σημείο και δεν υπάρχουν ενοχλητικά φώτα (ανεμογεννήτριες). Επίσης ήταν χαρακτηριστική η πολύ καλή διαύγεια του ουρανού λόγω του ότι είχε βρέξει την προηγούμενη μέρα. Το SQM-L έγραψε 21,4. Το σμήνος ήταν εξαιρετικά αμυδρό, μικρό, δεν φαινόταν συνεχόμενα αλλά επανεμφανιζόταν με πλάγια όραση σαν μια αμυδρή θολούρα μεταξύ 2 αμυδρών αστέρων στο 30% περίπου του χρόνου. Αυτό που μου έκανε εντύπωση ήταν ότι κάποιες φορές που εμφανιζόταν ήταν σαν να φαινόταν μετατοπισμένο λίγο πιο δεξιά από τη θέση που βρισκόταν. Το έχει προσπαθήσει κανείς αυτό το αντικείμενο; Μπορείτε να μας πείτε αν φάνηκε και σε εσάς; -
6η Πανελλήνια Εξόρμηση Ερασιτεχνών Αστρονόμων
Μανούσος απάντησε στην συζήτηση του/της astrovox σε Η αστρονομία στην Ελλάδα
Συγχαρητήρια στους διοργανωτές. Θέλω πολύ να έρθω στον Πάρνωνα, ωστόσο δεν ξέρω αν το επιτρέψουν οι καταστάσεις και στη φάση που θα βρίσκομαι το καλοκαίρι. -
Εκρήξεις Supernova και Nova!!
Μανούσος απάντησε στην συζήτηση του/της Μανούσος σε Παρατήρηση Βαθύ Ουρανού
Τελικά επιβεβαιώθηκε ως supernova αλλά στα 14,4 Σπεύσατε... -
Αστροπαρατήρησεις στην Κέρκυρα...
Μανούσος απάντησε στην συζήτηση του/της Bi2L σε Εξορμήσεις και τόποι παρατήρησης
Μπράβο παιδιά πάντα τέτοια. Δεν έχω δει ποτέ carbon star και δεν ξέρω πως είναι αλλά νομίζω θα αξίζει. Συγχαρητήρια για την αντοχή σας στο κρύο τόσες ώρες. -
O CERES είναι παρατηρήσιμος;
Μανούσος απάντησε στην συζήτηση του/της markhero σε Παρατήρηση κομητών, αστεροειδών, μετεώρων
Τη Δήμητρα (Ceres) την είχα δει πριν 2 χρόνια περίπου με το τηλεσκόπιο μου. Φαινόταν τότε και από τον ερευνητή. Θυμάμαι ήταν στην πιο κοντινή απόσταση με τη Γη. Φαινόταν σαν ένα δίσκος μικρός (στο μέγεθος περίπου του Ουρανού) και το χρώμα της ήταν κιτρινωπό. Αν βρεις που βρίσκεται τώρα νομίζω θα μπορείς να την εντοπίσεις. -
Κατασκευή goto για truss: ''ΙΠΠΑΡΧΟΣ''
Μανούσος απάντησε στην συζήτηση του/της Μανούσος σε Mastrovox
Τους γνωρίζω τους encoders αυτούς. Δυστυχώς οι encoders αυτοί είναι πολύ μικρής ανάλυσης. Απ'ότι βλέπω είναι 30 επαφών που σημαίνει ότι δίνουν ανάλυση 30 βήματα για 360 μοίρες ή 12μοίρες ανά βήμα. Αν υποθέσουμε ότι τους προσαρμόζουμε σε κάποια σχέση 750mm(διάμετρος az)/7mm(διάμετρος άξονα encoder) τότε αυτό μας δίνει 107.14 λόγο οπότε η ανάλυση που θα έχουμε θα είναι 0,112 (12/107,14) μοίρες ανά βήμα ή 6,7 λεπτά ενώ με τα mouse έχω 1,8 λεπτά με τις ίδιες σχέσεις. Για να χρησιμοποιήσω αυτούς τους encoders θα πρέπει να προσθέσω κι άλλο gearing για να αυξήσω περισσότερο την ανάλυση κάτι το οποίο είναι πολύ δύσκολο τεχνικά (ουσιαστικά θέλει ένα μειωτήρα επιπλέον). Σε ευχαριστώ για το ενδιαφέρον σου. -
Κατασκευή goto για truss: ''ΙΠΠΑΡΧΟΣ''
Μανούσος απάντησε στην συζήτηση του/της Μανούσος σε Mastrovox
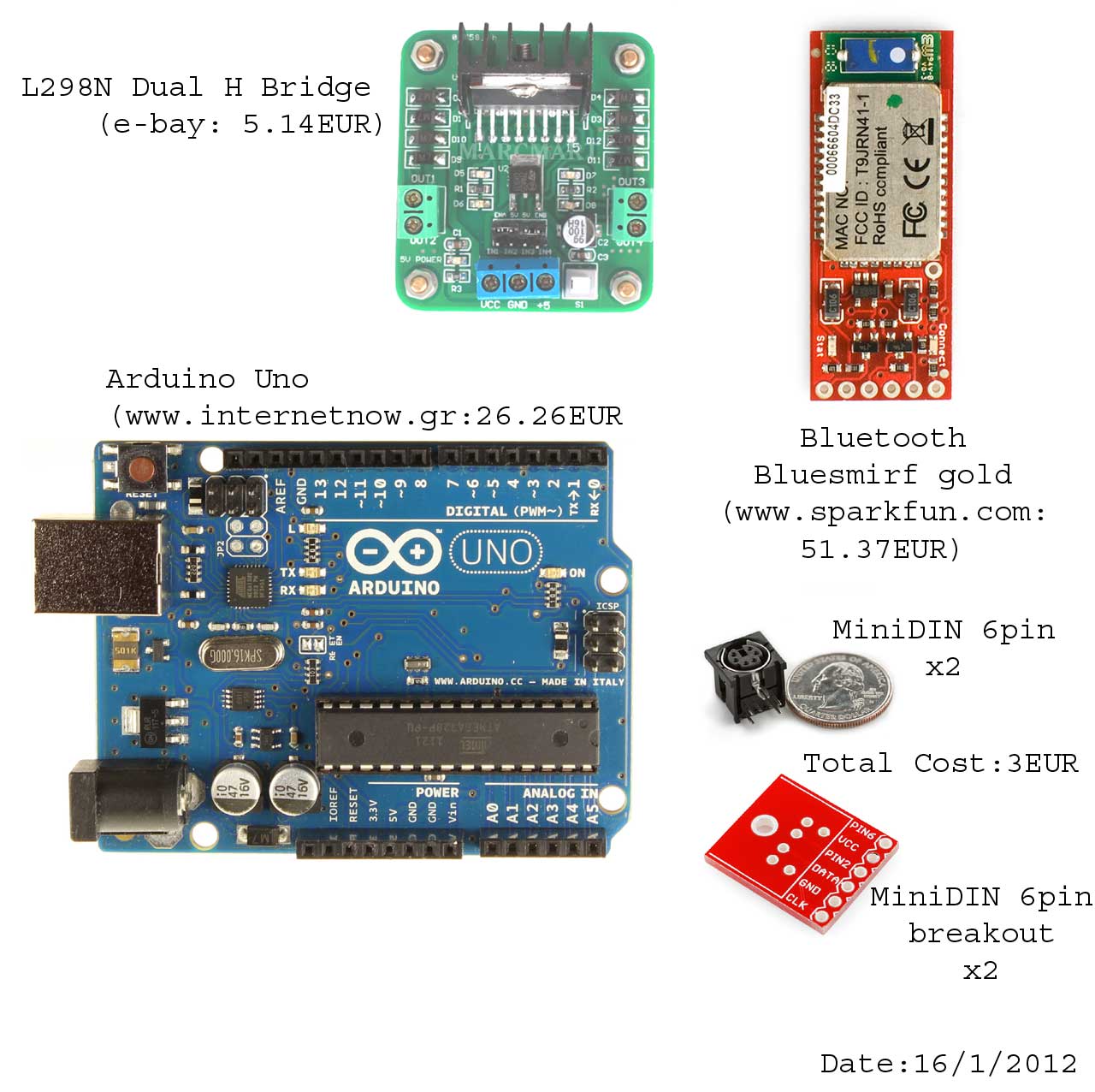
Ο παραπάνω αλγόριθμος δυστυχώς δεν αποδίδει όπως το περίμενα. Όταν η απόσταση που πρέπει να διανύσει είναι μεγάλη τότε δεν υπάρχει πρόβλημα. Το πρόβλημα είναι στο tracking που συνεχώς πρέπει να κάνει διορθώσεις σε πολύ μικρές αποστάσεις και υπάρχει μια απόκλιση της τάξεως της 1 μοίρας. Στον παραπάνω αλγόριθμο ξέχασα να αναφέρω ότι θα πρέπει να γνωρίζουμε πόσα DPI ανάλυσης είναι το mouse που χρησιμοποιούμε. Δυστυχώς όμως οι αναλύσεις που αναφέρονται στα mouse δεν είναι οι πραγματικές όσο αφορά τη διασύνδεσή τους με τον μικροελεγκτή. Οπότε έπρεπε να βρω έναν τρόπο να υπολογίσω πόσα DPI είναι στην πραγματικότητα τα mouse. Έφτιαξα λοιπόν ένα δεύτερο firmware το οποίο με έκανε παρακολούθηση (monitoring) τα βήματα. Μέτρησα με ένα παχύμετρο 1 ίντσα και σημείωσα σε ένα χαρτί την απόσταση. Μετά τοποθέτησα το mouse δίπλα στα σημάδια και το κούνησα ακριβώς όσο 1 ίντσα. Έτσι λοιπόν κατάφερα να μετρήσω τα DPI σε 225 και όχι σε 400 όπως έλεγαν οι προδιαγραφές. Εν τω μεταξύ έκανα μια λίστα με τα υλικά που χρειαζόμαστε για να υλοποιήσουμε το σύστημα αλλά και το κόστος τους. Το κόστος μέχρι στιγμής είναι στα 133,37Ευρώ. Λείπουν κάποια υλικά τα οποία είναι κάποιοι connectors και ένα κουτί για να μπουν όλα τα ηλεκτρονικά μέσα. Επίσης τα στελέχη των μοτέρ τα έφτιαξα με ξύλο, ντίζα και ρουλεμάν τα οποία μαζί με τις βίδες κόστισαν περίπου 10Ευρώ.
-
Επηρεάζει η οικον. κρίση την ενασχόλησή σας με την ερ.Αστρ;
Μανούσος απάντησε στην συζήτηση του/της Bi2L σε Δημοψηφίσματα
Δεν το κρύβω ότι με έχει επηρεάσει αλλά περισσότερο από ψυχολογικής πλευράς. Δηλαδή ο φόβος της απώλειας της δουλειάς με κάνει να σκέφτομαι τα έξοδα μου για διάφορες δραστηριότητες περισσότερο από πριν. Βέβαια έχω να αγοράσω πάρα πολύ καιρό αστρονομικό εξοπλισμό αλλά αυτό δεν έχει να κάνει με την κρίση αλλά του ότι έχω ότι χρειάζομαι για να κάνω μια εξόρμηση, οπότε τα έξοδά μου είναι μόνο η βενζίνα που θα κάψω για να πάω στο βουνό. -
Δυστυχώς φίλε μου η ερασιτεχνική αστρονομία στην Ελλάδα δεν είναι τόσο ώριμη. Τα βιβλία που υπάρχουν στα Ελληνικά και αφορούν θέματα ερασιτεχνών αστρονόμων είναι ελάχιστα. Και στα αγγλικά πάντως μη νομίζεις ότι υπάρχει ποικιλία.
-
Κατασκευή goto για truss: ''ΙΠΠΑΡΧΟΣ''
Μανούσος απάντησε στην συζήτηση του/της Μανούσος σε Mastrovox
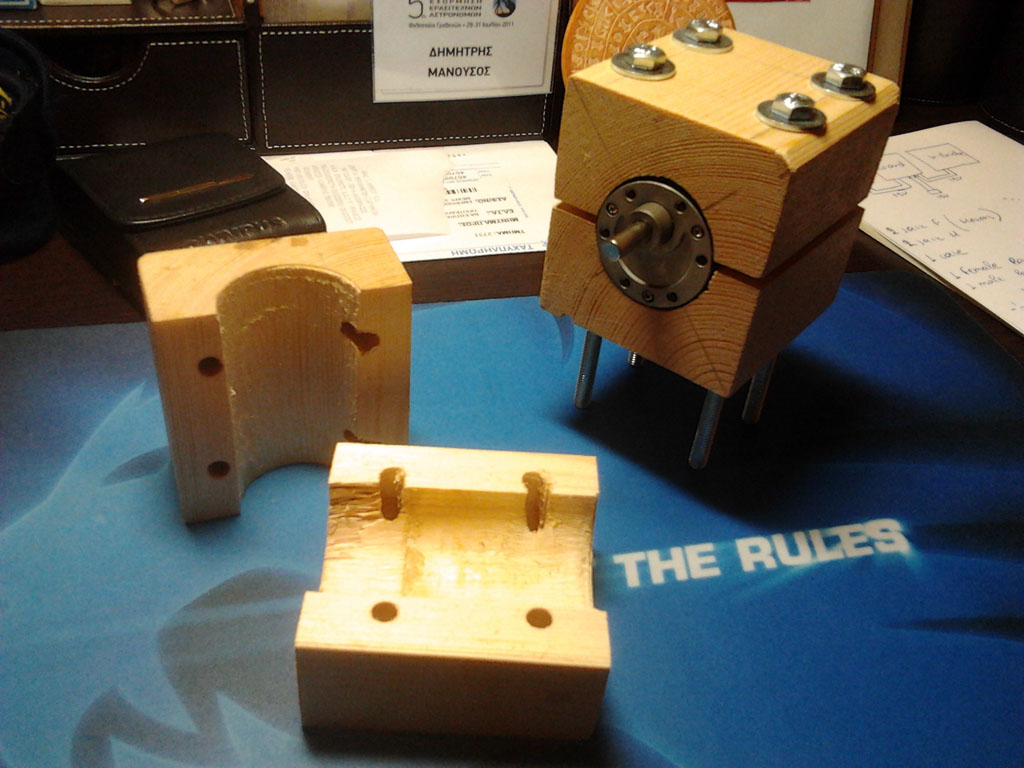
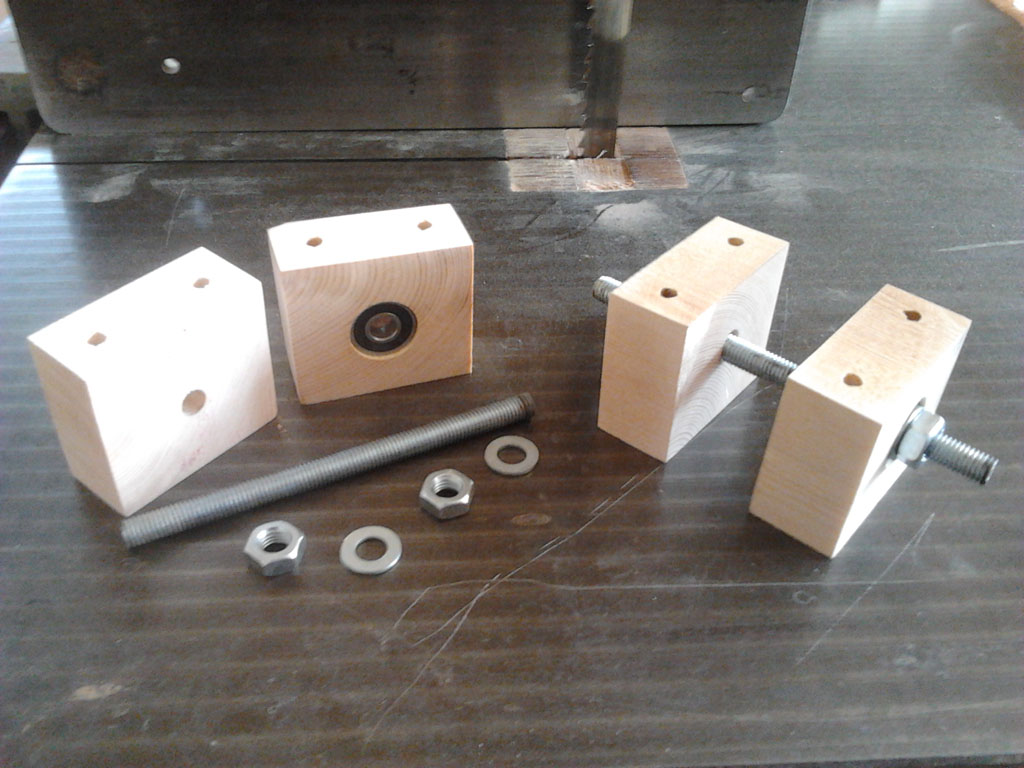
Χτες το βράδυ πειραματίστηκα λίγο με το goto αλγόριθμο. Ο αλγόριθμος του goto είναι ο εξής: Σε κάθε κύκλο (πχ 200ms): 1. Στείλε την τρέχουσα θέση Alt/Az του στόχου από το software στον Arduino. H τρέχουσα θέση υπολογίζεται από το software και είναι ένα ζεύγος μοιρών σε δεκαδική μορφή πχ "alt=65,568,az=152,236". 2. Ο Arduino παίρνει αυτό το ζεύγος τιμών και το μετατρέπει σε βήματα με τον εξής τρόπο: -Μετατρέπουμε τις 360 μοίρες σε δευτερόλεπτα (360*60*60 = 1.296.000). Αυτό το κάνουμε μια φορά στην αρχή του προγράμματος. -Διαιρούμε το παραπάνω νούμερο με τα βήματα που κάνει το mouse σε μια πλήρη περιστροφή. Αυτό μας δίνει πόσα δευτερόλεπτα της μοίρας αντιστοιχούν σε 1 βήμα. Όσο μεγαλύτερη ακτίνα τόσο μεγαλύτερη ακρίβεια θα έχουμε. Πχ αν σε μια πλήρη περιστροφή έχουμε 10.000 βήματα τότε το κάθε βήμα αντιστοιχεί σε 1.296.000/10.000 = 129,6 δευτερόλεπτα της μοίρας ή 2,16 λεπτά. Αν έχουμε 20.000 βήματα δηλαδή μεγαλύτερο κύκλο τότε η ακρίβειά μας αυξάνεται στο 1,8λεπτά κ.ο.κ. -Παίρνουμε την τιμή του Alt και τη μετατρέπουμε σε δευτερόλεπτα (65,568*60*60=236.044, -Διαιρούμε αυτό το νούμερο με τα δευτερόλεπτα που ξέρουμε για το 1 βήμα και ξέρουμε πόσα βήματα πρέπει να διανύσουμε (236.044,8/129,6 = 1821,33 βήματα). Στρογγυλοποιούμε το νούμερο. 3. Δίνουμε το παραπάνω νούμερο στον PID αλγόριθμο. Ο αλγόριθμος βλέπει πού είναι την προηγούμενη φορά και ανάλογα δίνει εντολή στο μοτέρ να πάει μπροστά ή πίσω και με την ανάλογη ταχύτητα. Προς το παρόν έχω τελειώσει με το κομμάτι του firmware το οποίο δείχνει να δουλεύει σωστά. Το επόμενο βήμα είναι να τροποποιήσω το software ώστε να στέλνει τα δεδομένα στον Arduino κάθε διακριτό χρονικό διάστημα. Εν τω μεταξύ έχω ξεκινήσει να υλοποιώ το κομμάτι του hardware που θα εγκατασταθεί πάνω στο τηλεσκόπιο. Το πρώτο πράγμα είναι να φτιαχτούν τα στελέχη των μοτέρ που θα μεταδίδουν την κίνηση πάνω στη βάση. Το κάθε μοτέρ θα συνδέεται με έναν μικρό άξονα ο οποίος με τη σειρά του θα μεταδίδει την κίνηση στη βάση. Ο άξονας θα πρέπει να περιστρέφεται μέσω ρουλεμάν τα οποία θα κάθονται πάνω σε κουζινέτα. Δυστυχώς τα κουζινέτα για τόσο μικρά ρουλεμάν δεν υπάρχουν οπότε και έφτιαξα από ξύλο δικά μου. Η βάσεις των μοτέρ. Εδώ φαίνονται οι άξονες και τα ρουλεμάν. Τα ξύλινα κομμάτια είναι τα αυτοσχέδια κουζινέτα για να κάθονται τα ρουλεμάν.
-
Κατασκευή goto για truss: ''ΙΠΠΑΡΧΟΣ''
Μανούσος απάντησε στην συζήτηση του/της Μανούσος σε Mastrovox
Αυτό είναι μια καλή ιδέα για να μειώσω τον όγκο αλλά μετά πρέπει να φτιάξω ένα κουτί για να βάλω την πλακέτα μέσα. Δεν ξέρω το σκέφτομαι. Αν έχετε καμιά ιδέα κι εσείς για να μπορώ να φτιάξω κάτι πιο μικρό σε όγκο είναι ευπρόσδεκτη. Μόλις ανέβηκε και ο πηγαίος κώδικας του λογισμικού. Αργότερα θα ανεβάσω πληροφορίες συνδεσμολογίας για την πρώτη έκδοση. Μπορείτε να κατεβάσετε τον κώδικα με κάποιο client svn. Το project ανοίγει με NetBeans και έχει μέσα όλες τις απαραίτητες βιβλιοθήκες για serial επικοινωνία, Matrix υπολογισμούς κτλ. -
Κατασκευή goto για truss: ''ΙΠΠΑΡΧΟΣ''
Μανούσος απάντησε στην συζήτηση του/της Μανούσος σε Mastrovox
Λοιπόν παιδιά τον κώδικα του software-firmware μπορείται να τον κατεβάζετε από εδώ: http://code.google.com/p/hipparchus/ στο Downloads. Προς το παρόν το firmware υποστηρίζει push to σε συνεργασία όμως με το λογισμικό που θα τρέχει σε υπολογιστή. Συγχωρέστε με όμως γιατί δεν έχω ανεβάσει ακόμη το source code του λογισμικού και το site είναι ακόμη έλλειπες όσο αφορά τις οδηγίες συνδεσμολογίας των ηλεκτρονικών αλλά και γενικότερες οδηγίες χρήσης αλλά αφού μου το ζητήσατε ανέβασα το firmware για να σας βοηθήσει σε δικά σας έργα. Η πρώτη έκδοση του συστήματος είναι για χρήση push to. Δηλαδή αφού προσαρμόσουμε τα ποντίκια μας στη βάση, έχουμε ένα σύστημα έτοιμο για να μας βρίσκει ότι αντικείμενο του βάλουμε σε συντεταγμένες. Το παραπάνω site θα εμπλουτιστεί με υλικό και εικόνες καθώς και με τον κώδικα. Εδώ όμως θα ήθελα να παρακαλέσω να τηρήσουμε τους κανόνες των δικαιωμάτων του κώδικα GPL. -
Κατασκευή goto για truss: ''ΙΠΠΑΡΧΟΣ''
Μανούσος απάντησε στην συζήτηση του/της Μανούσος σε Mastrovox
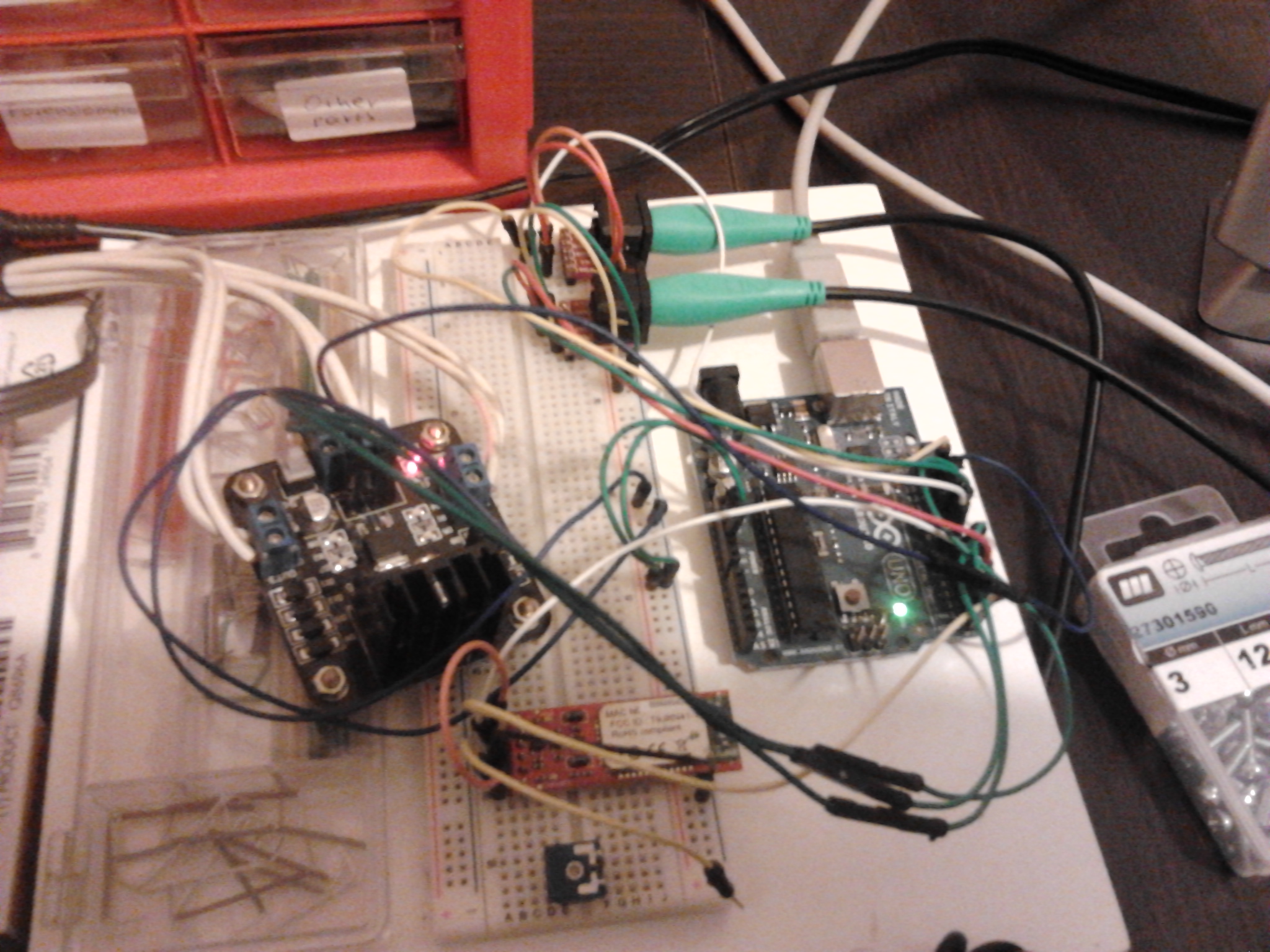
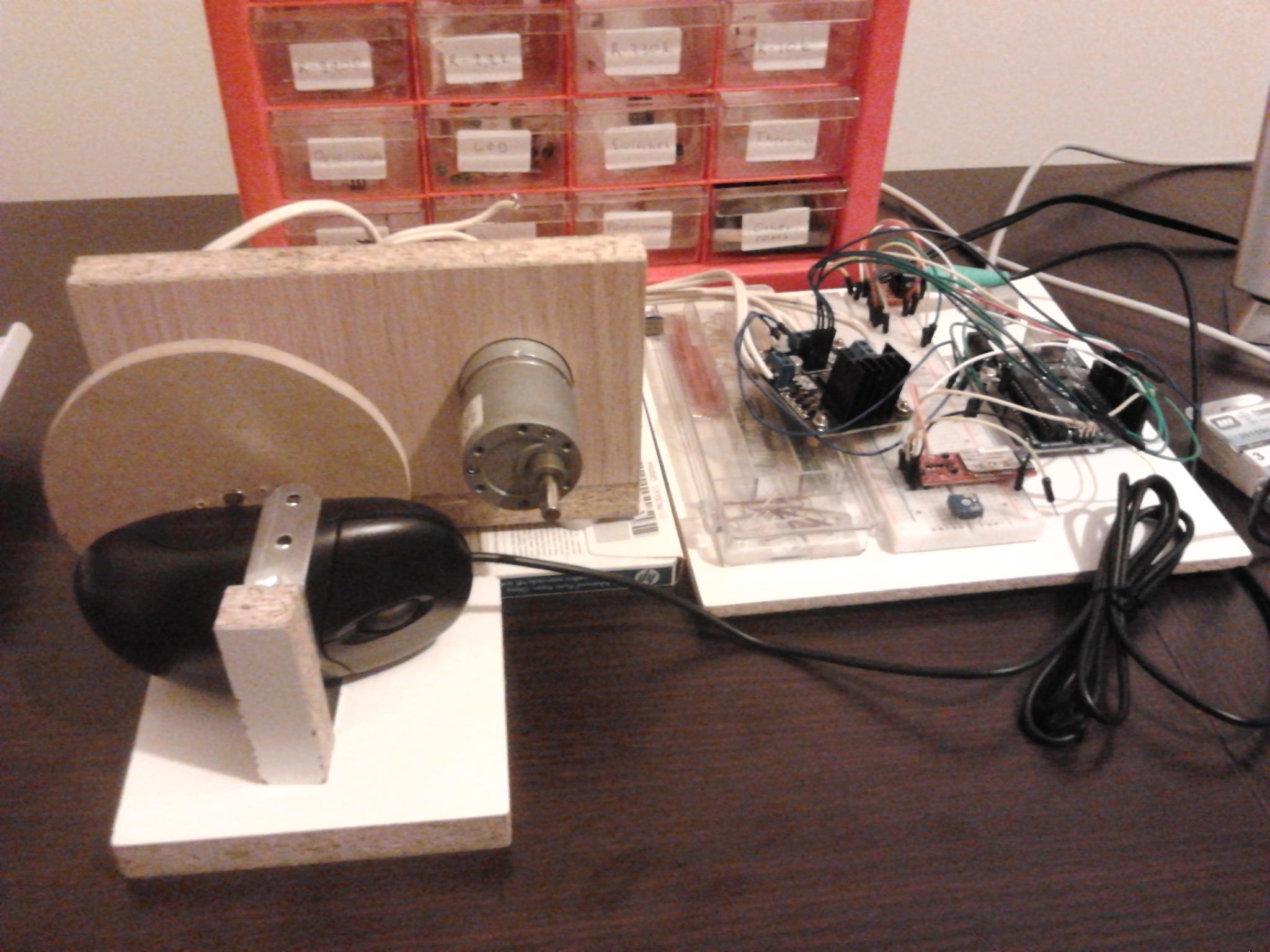
Συνεχίζω την περιγραφή με το δεύτερο κομμάτι όπου είναι τα ηλεκτρονικά. Μικροελεγκτής Όπως περιέγραψα και παραπάνω ο μικροελεγκτής είναι της Atmel ο Atmega328 ο οποίος έρχεται με την πλατφόρμα ανοιχτού υλικού Arduino. Ο Arduino είναι μια ολοκληρωμένη πλακέτα η οποία συνδέεται με USB στον υπολογιστή μας και με το Arduino IDE μπορούμε να φτιάξουμε το δικό μας πρόγραμμα (firmware) το οποίο φορτώνουμε μετά στον μικροελεγκτή. Ο μικροελεγκτής έχει εισόδους και εξόδους από τις οποίους μπορούμε να δίνουμε και να παίρνουμε εντολές και δεδομένα από άλλα ηλεκτρονικά και να εκτελούμε κάποια δουλειά (πχ να αναβοσμήνουμε ένα LED κάθε δευτερόλεπτο). Η δουλειά που θέλουμε να κάνει λοιπόν ο μικροελεγκτής είναι να παίρνει τα δεδομένα από 2 mouse και να τα στέλνει στο λογισμικό μέσω ενός Bluetooth. Επίσης ο μικροελεγκτής θα παίρνει δεδομένα θέσης (πχ "κούνα το μοτέρ Az κατά 100 βήματα"). Εσωτερικά το firmware εκτελεί έναν αλγόριθμο PID και δίνει σε κάθε κύκλο ουσιαστικά την κίνηση που πρέπει να κάνει, παίρνοντας παράλληλα και τη θέση που του δίνουν τα mouse. Ο αλγόριθμος PID είναι ένας αλγόριθμος που δέχεται ανάδραση και δίνει κάποια απόκριση. Δεν χρειάζεται να πω πολλά εδώ γιατί θα γίνομαι κουραστικός. Κόστος της αναπτυξιακής πλακέτας είναι 30Ευρώ. Παρακάτω όπως θα δείτε έχω κάποιες φωτογραφίες όπου είναι το στήσιμο του συστήματος δοκιμαστικά σε μικρό μέγεθος και όχι πάνω στη βάση. Εδώ είναι όλα τα ηλεκτρονικά. Δεξιά η μεγάλη πλακέτα είναι ο μικροελεγκτής πάνω στην αναπτυξιακή πλακέτα Arduino. To κόστος της πλακέτας είναι 30Ευρώ. Αριστερά είναι μια άλλη μικρότερη πλακέτα όπου είναι ο motor driver. Στο κάτω μερος είναι το Bluotooth γ Εδώ όλο το σύστημα με τα ηλεκτρονικά. Προσέξτε αριστερά τη διάταξη με τα μοτέρ όπου στο ένα έχω προσαρμώσει έναν κυκλικό δίσκο για να προσωμοιώσω την κίνηση του τηλεσκοπίου και από πάνω είναι σε επαφή το ένα από τα mouse όπου όταν γυρίζει το μοτέρ αυτό κα
-
Κατασκευή goto για truss: ''ΙΠΠΑΡΧΟΣ''
Μανούσος απάντησε στην συζήτηση του/της Μανούσος σε Mastrovox
Να σου πω την αλήθεια δεν ξέρω πόση ροπή χρειάζεται. Εξαρτάται από πολλά πράγματα όπως τον τρόπο για παράδειγμα που θα προσαρμόσεις το μοτέρ σε κάθε άξονα και τη δύναμη που χρειάζεται για να περιστρέψει τον άξονα αυτό. Τα μοτέρ που έχω πάρει είναι μοτέρ DC 12V στα 2RPM και ροπή 40Νcm ή 4Kgcm αλλά αυτό προϋποθέτει ότι τα μοτέρ έχουν προσαρμοστεί απευθείας στους άξονες. Αυτό που σκέφτομαι είναι να προσαρμόσω τα μοτέρ στις περιφέρειες πχ στην άκρη του στρογγυλού ξύλου στο Az. Εκεί χρειάζεται πολύ μικρότερη δύναμη από τα 4Kg αλλά σίγουρα θα πρέπει να τα προσαρμόσω πρώτα για να έχω μια σίγουρη απάντηση να σου δώσω. Προς το παρόν δεν έχω φτάσει ακόμη εκεί αλλά είναι το επόμενο στάδιο. Τα μοτέρ τα πήρα από εδώ: http://www.ebay.co.uk/itm/2-RPM-DC-Torque-Gear-Box-Motor-12V-/160552621648?pt=UK_BOI_Industrial_Automation_Control_ET&hash=item2561ae9650. Το κάθε ένα κοστίζει 11Λίρες περίπου οπότε δεν είναι τόσο ακριβά όσο φαντάζεσαι, εκτός και να εννοείς κάτι άλλο. -
Κατασκευή goto για truss: ''ΙΠΠΑΡΧΟΣ''
Μανούσος απάντησε στην συζήτηση του/της Μανούσος σε Mastrovox
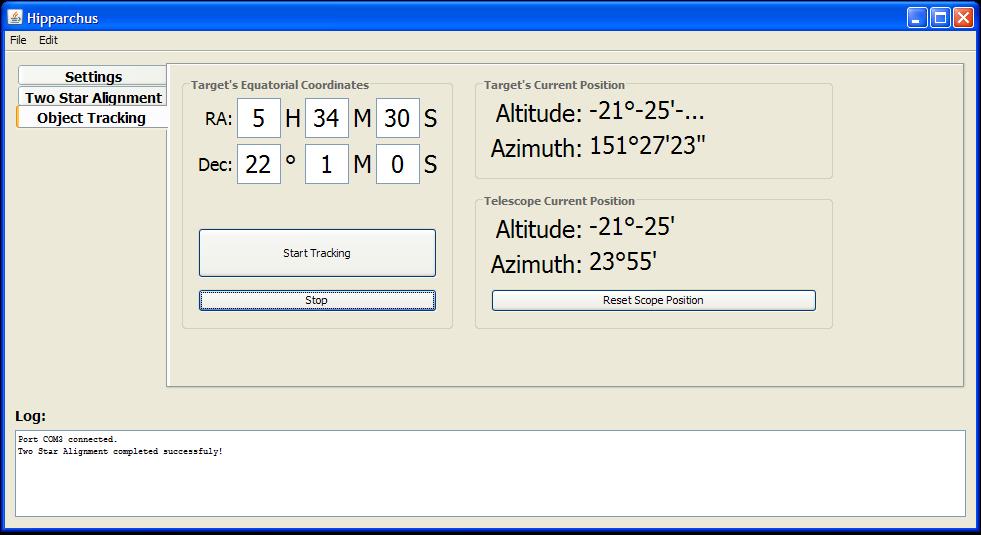
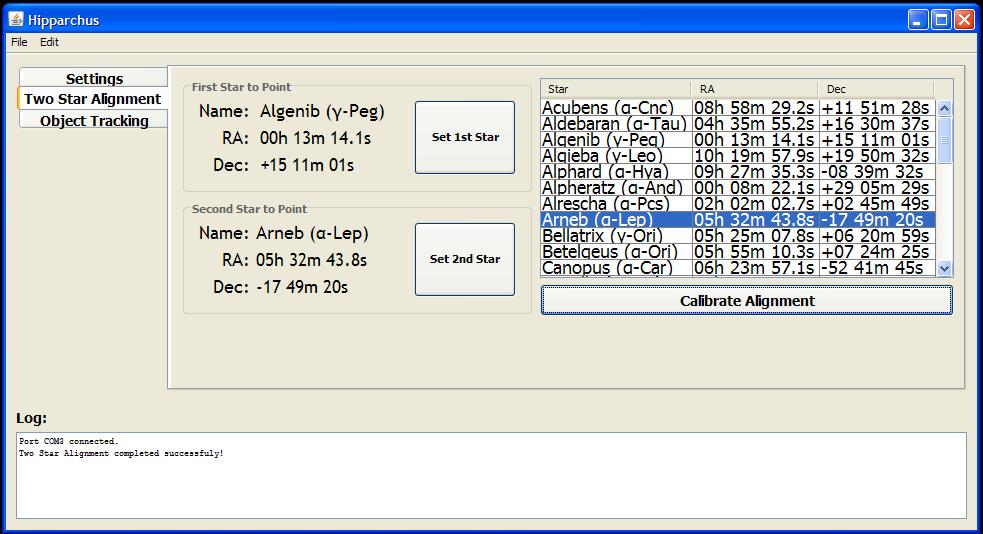
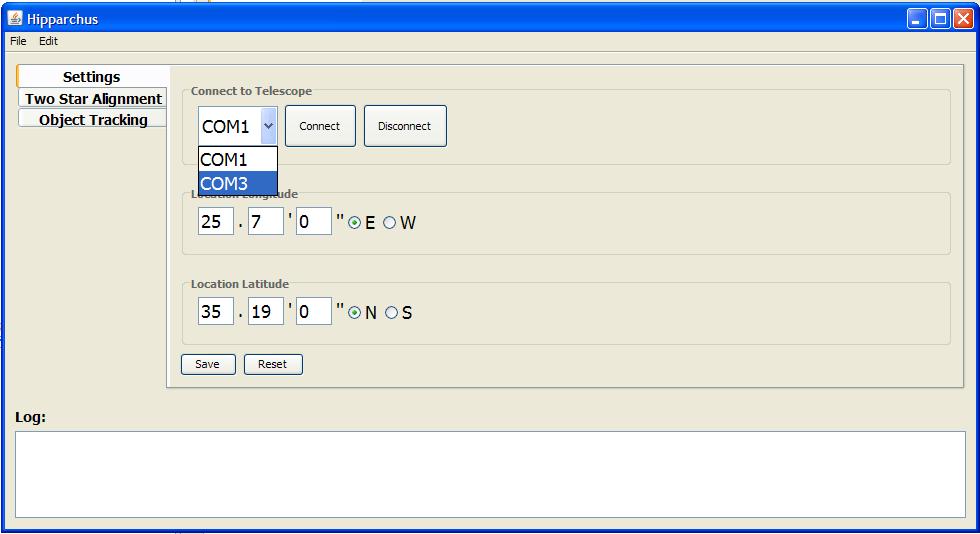
Παραθέτω μερικά στιγμιότυπα από το πρόγραμμα το οποίο εκτελεί τους απαραίτητους υπολογισμούς για την εισαγωγή των δεδομένων θέσης την σύνδεση με την σωστή θύρα του bluetooth και την ευθυγράμμιση 2 αστέρων. Επίσης την τρέχουσα θέση του αντικειμένου που θέλουμε να πάμε και την τρέχουσα θέση του τηλεσκοπίου. Αυτή τη στιγμή έτσι όπως είναι το σύστημα μπορεί να δουλέψει και σαν Push-to με το χέρι απλά βλέποντας πού είναι ο στόχος και μετακινώντας με το χέρι κάνοντας ταυτοποίηση της τρέχουσας θέσης με τη θέση που μας δείχνει ότι βρίσκεται ο στόχος. Εισαγωγή στόχου και εμφάνιση τρέχουσας θέσης του στόχου και του τηλεσκοπίου. Ευθυγράμμιση 2 αστέρων Εισαγωγή τοποθεσίας και σύνδεση με τη θύρα Bleutooth
-
Κατασκευή goto για truss: ''ΙΠΠΑΡΧΟΣ''
Μανούσος απάντησε στην συζήτηση του/της Μανούσος σε Mastrovox
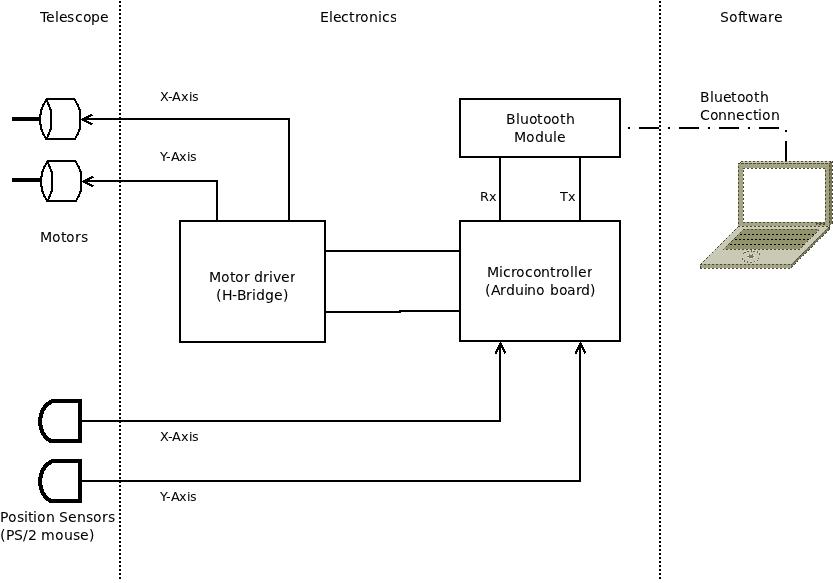
Ευχαριστώ πολύ παιδιά. Σίγουρα θα χρειαστώ τη βοηθειά σας σε κάποια θέματα γιατί δυστυχώς το φάσμα γνώσεων που πρέπει να έχει κάποιος είναι πολύ μεγάλο (από ηλεκτρονικά και μηχανολογικά, μέχρι προγραμματισμό και μαθηματικά). Αρχικά θα ήθελα να ξεκινήσω να περιγράφω τα επιμέρους κομμάτια του συστήματος. Παρακάτω έχω επισυνάψει μια εικονα η οποία μπορεί να μας βοηθήσει να δούμε ποιά είναι τα κομμάτια αυτά και πώς διασυνδέονται μεταξύ τους. Θα ξεκινήσω να περιγράφω πρώτα το λογισμικό το οποίο ήταν το πρώτο που ξεκινησα να υλοποιώ. Λογισμικό Το λογισμικό το οποίο τρέχει αρχικά σε PC/Laptop έχει υλοποιηθεί σε γλώσσα προγραμματισμού Java και δουλεύει σε Windows XP, Vista, 7 32 ή 64 bit. Ο υπολογιστής θα πρέπει να έχει εγκατεστημένο το Java Virtual Machine και να υποστηρίζει Bluetooth επικοινωνία. Η δουλειά του λογισμικού είναι να δέχεται δεδομένα θέσης από τον μικροελεγκτή και να κάνει τους απαραίτητους μαθηματικούς υπολογισμούς μεταφράζοντας αυτά τα δεδομένα σε 2 συστήματα συντεταγμένων (πχ RA/Dec <-> Alt/Az) και παράλληλα να στέλνει δεδομένα της επόμενης θέσης στο μικροελεγκτή. Πιο αναλυτικά τα χαρακτηριστικά της εφαρμογής είναι: * Δυνατότητα διασύνδεσης Bluetooth με το μικροελεγκτή Arduino για ανταλλαγή δεδομένων. * Εισαγωγή δεδομένων τοποθεσίας. * Εμφάνιση λίστας ορατών αστέρων ανάλογα την τοποθεσία μας και την ώρα συστήματος για ευκολότερη ευθυγράμμιση. * Δυνατότητα ευθυγράμμισης 2 αστέρων. * Εισαγωγή ισημερινών συντεταγμένων στόχου και μετατροπή σε Υψοαζιμουθιακές. * Εμφάνιση τρέχουσας θέσης τηλεσκοπίου. * Εμφάνιση συντεταγμένων στόχου (RA/Dec και τρέχουσα Alt/Az). Ως γνωστό οι ισημερινές συντεταγμένες για κάθε αντικείμενο είναι σταθερές και δεν αλλάζουν. Οι αλταζιμουθιακές όμως αλλάζουν κάθε στιγμή και επειδή η στήριξη του τηλεσκοπίου μας είναι αλταζιμουθιακή χρειαζεται να γνωρίζουμε που βρίσκεται το αντικείμενο ως προς X,Y άξονες κάθε διακριτό κομμάτι χρόνου (πχ κάθε 1/10 sec). Δεν θα μπω σε πολλές τεχνικές λεπτομέρειες αλλά θέλω να περιγράψω λίγο την καρδιά του προγράμματος το οποίο είναι ο αλγόριθμος μετασχηματισμού συντεταγμένων. Ο αλγόριθμος αυτός μας ο βηθάει να μετατρέπουμε από το ένα σύστημα συντεταγμένων στο άλλο εισάγωντας Ra/Dec και Alt/Az δεδομένα από 2 γνωστά αντικείμενα στον ουρανό. Κανονικά ο αλγόριθμος δουλεύει με 3 διαφορετικά αντικείμενα αλλά το 3ο μπορεί να βγει με τη μέθοδο του γωνιακού διαχωρισμού (angular separation). Ο αλγόριθμος χρησιμοποιεί πράξεις με πίνακες όπου το κάθε στοιχείο του πίνακα ειναι μια τριγωνομετρική σχέση η οποία περιέχει δεδομένα θέσης, τρέχων χρόνος και συντεταγμένες. Το αποτέλεσμα του αλγόριθμου είναι ένας πίνακας μετασχηματισμού (transformation matrix) από τον οποίο μπορούμε να μετατρέψουμε από τον ένα σύστημα στο άλλο. Για όποιον ενδιαφέρεται μπορεί να διαβάσει το εξαιρετικό κείμενο του Toshimi Taki το οποίο περιγράφει με παραδείγματα τον αλγόριθμο και τα μαθηματικά που χρησιμοποιούντε. Τοποθεσία: http://www.geocities.jp/toshimi_taki/matrix/matrix.htm Κείμενο: http://www.geocities.jp/toshimi_taki/matrix/matrix_method_rev_e.pdf Σε επόμενο post θα ανεβάσω στιγμιότυπα από το πρόγραμμα. Αρχιτεκτονική του συστήματος "Ιππαρχος" matrix_method_rev_e.pdf Toshimi Taki Matrix method transformation
-
Αγαπητοί φίλοι! Με χαρά αλλά και δισταγμό ανοίγω αυτό το θέμα το οποίο θα φιλοξενήσει στο μέλλον αναλυτικά σχέδια και περιγραφές οι οποίες αφορούν ένα έργο (project) το οποίο το τρέχω σχεδόν 1 χρόνο τώρα. Χαρά γιατί θέλω πολύ να μοιραστώ μαζί σας αυτό που έχω φτιάξει και το οποίο ακόμη βρίσκεται σε εξέλιξη. Δισταγμό όμως γιατί δεν ξέρω αν τελικά καταφέρω και το φέρω εις πέρας. Το έργο έχει να κάνει με την κατασκευή εξ ολοκλήρου ενός συστήματος αυτόματης παρακολούθησης για ερασιτεχνικά τηλεσκόπια με στήριξη Dob. Λειτουργίες του συστήματος *αυτόματη η οποία θα δίνει goto και tracking *χειροκίνητη θα επιτρέπει στο χρήστη να κουνάει με τη βοήθεια των μοτέρ και όχι με το χέρι. Αυτό επιτρέπει πολύ λεπτές μικροκινήσεις οι οποίες με το χέρι δεν γίνονται τόσο ομαλά σε μια στήριξη dob. Μέρη του συστήματος *2 μοτέρ τα οποία θα προσαρμοστούν στην στήριξη dob κατά τους άξονες Az/Alt θα μετακινούν το τηλεσκόπιο. Τα μοτέρ θα ελέγχονται από έναν μικροελεγκτή όσο αφορά ταχύτητα και κατεύθυνση. *2 αισθητήρες κατάλληλα προσαρμοσμένοι στη στήριξη θα δίνουν την τρέχουσα θέση όπου βρίσκεται ο σωλήνας. *1 μικροελεγκτής ο οποίος θα επικοινωνεί με τα μοτέρ και τους αισθητήρες. *1 υπολογιστικό σύστημα (PC, laptop ή Smartphone) το οποίο θα επικοινωνεί με το μικροελεγκτή και μέσω λογισμικού θα κάνει τους μαθηματικούς υπολογισμούς για το goto και το tracking. Το υπολογιστικό σύστημα θα επικοινωνεί ασύρματα με τον μικροελεγκτή ο οποίος θα βρίσκεται πάνω στη βάση του τηλεσκοπίου και θα δίνει εντολές κίνησης ανάλογα με την ανάδραση που θα παίρνει. Αυτά εν ολίγοις είναι τα βασικά χαρακτηριστικά του συστήματος. Ο λόγος που ξεκίνησα να το φτιάχνω είναι επειδή τα έτοιμα συστήματα για στηρίξεις dob μέχρι τώρα είναι πολύ ακριβά. Οπότε και ήθελα ένα σύστημα το οποίο δεν θα ήταν τόσο ακριβό θυσιάζοντας ένα ποσοστό ακρίβειας στο tracking. Δηλαδή το σύστημα θα προορίζεται για οπτική παρατήρηση και όχι για αστροφωτογράφηση deep sky (έτσι κι αλλιώς δεν γίνεται λόγο περιστροφής του πεδίου). Επιλογή μοτέρ Στις αρχές που το ξεκίνησα προσπάθησα να κάνω έναν πρόχειρο προϋπολογισμό, οπότε και έπρεπε να βρω τι υλικό (hardware) θα χρησιμοποιήσω. Για τα μοτέρ επέλεξα να είναι απλά DC μοτέρ με μειωτήρα στροφών. Δεν ήθελα να χρησιμοποιήσω βηματικά ούτε servo λόγο κόστους. Εδώ όμως υπάρχει ένα μειονέκτημα. Τα βηματικά μοτέρ σου επιτρέπουν να κουνάς με βήματα ελέγχοντας πόσο έχει περιστραφεί το μοτέρ. Τα DC μοτέρ δεν το έχουν αυτό. Οπότε έπρεπε με κάποιο τρόπο να μπορώ να γνωρίζω αυτή την κίνηση, δηλαδή πόσες μοίρες έχουν περιστραφεί τα μοτέρ. Αισθητήρες Ένας τρόπος να λυθεί το πρόβλημα είναι η ενσωμάτωση κωδικοποιητών θέσης στους άξονες των μοτέρ. Οι κωδικοποιητές θέσης στέλνουν ένα ζεύγος παλμών με διαφορά φάσης σε έναν μικροελεγκτή και ο μικροελεγκτής "μεταφράζει" αυτούς τους παλμούς σε βήματα μέσω του firmware που έχουμε εμείς φτιάξει. Έτσι μπορούμε να γνωρίζουμε πόσο θέλουμε να περιστρέψουμε τα μοτέρ μας ελέγχοντας κάθε φορά πόσο έχει μετακινηθεί. Δυστυχώς όμως οι κωδικοποιητές θέσης που υπάρχουν στο εμπόριο είναι πολύ ακριβοί και απαγορευτικοί για το έργο. Μια λοιπόν λύση στο πρόβλημα ήταν να χρησιμοποιήσω 2 παλιά mouse PS/2 τα οποία προσαρμόζοντάς τα στο Alt και στο Az με τέτοιο τρόπο να μπορούν να μου δίνουν τη βήματα ακουμπώντας πάνω σε έναν περιστρεφόμενο κυκλικό δίσκο. Ο ένας κυκλικός δίσκος είναι έτοιμος και είναι η βάση του dob η οποία περιστρέφεται κατά το az. Στο alt αντίστοιχα μπορούμε να προσαρμόσουμε επίσης ένα δίσκο πάνω στα πλαστικά στηρίγματα του σωλήνα. Μικροελεγκτής Για μικροελεγκτή επέλεξα τον Atmega328 ο οποίος έρχεται έτοιμος με την πλατφόρμα ανοιχτού υλικού (open source hardware) Arduino. Η πλατφόρμα αυτή κοστίζει περί τα 30Ευρώ και σου επιτρέπει να προγραμματίζεις πολύ εύκολα σε γλώσσα wiring (βασισμένη στην C) το ελεγκτή. Υπάρχει πάρα πολύ υλικό και ελεύθερες βιβλιοθήκες για να φτιάξεις πάρα πολλά πράγματα. Δείτε εδώ να πάρετε μια ιδέα: http://el.wikipedia.org/wiki/Arduino Όσοι ασχολούνται με τα ηλεκτρονικά μπορεί ήδη να τον γνωρίζουν. Λογισμικό Όσο αφορά τέλος το υπολογιστικό σύστημα και το λογισμικό αυτό μπορεί να είναι ένα laptop ή ένα smartphone. Η πρώτη έκδοση του συστήματος θέλησα να τρέχει πρώτα σε κάποιο υπολογιστή και αργότερα θα μεταφερθεί και θα τρέχει και σε smartphone. O ρόλος του λογισμικού θα είναι να παίρνει τα δεδομένα από τον μικροελεγκτή, να κάνει τους απαραίτητους υπολογισμούς για το tracking και το goto και να στέλνει πίσω στον μικροελεγκτή τις εντολές για να μετακινήσει τα μοτέρ. Δυστυχώς ο μικροελεγκτής είναι πολύ αργός για να κάνει τέτοιου είδους υπολογισμούς οπότε σκέφτηκα να εκμεταλευτώ τη δύναμη του laptop ή ενός smartphone αργότερα. Οι περισσότεροι από εμάς έχουμε στην κατοχή μας ένα laptop ή ένα smartphone. Οπότε το κόστος γι'αυτό έχει αφαιρεθεί. Σκοπός μου δεν είναι να εκμεταλευτώ εμπορικά το σύστημα αλλά να δώσω όλες τις οδηγίες και το λογισμικό που απαιτείται δωρεάν ώστε να είναι ένα open source project και τα περιορίζει το κόστος μόνο στα απαραίτητα υλικά κομμάτια του έργου. Σε επόμενο post θα ξεκινήσω να εξηγώ τα επιμέρους κομμάτια του έργου με φωτογραφίες.
-
dobsonian 8αρι ή 10αρι στην περιπτωση μου;
Μανούσος απάντησε στην συζήτηση του/της ten_ten σε Τηλεσκόπια
Συμφωνώ κι εγώ με τον Τάσο 100%. Το 10" είναι ένα τηλεσκόπιο που μπορείς να μεταφέρεις εύκολα. Τα λεφτά του είναι λίγα σε σχέση με αυτό που παίρνεις και με αυτά που θα δεις. Είναι το καλύτερο απόδοση/τιμή τηλεσκόπιο που μπορείς να έχεις. -
Περιήγηση με αστροάλματα ή αγορά GOTO
Μανούσος απάντησε στην συζήτηση του/της PanosSky σε Η γωνιά των νέων αστροπαρατηρητών
Πολύ καλύτερα να κάνεις αστροάλματα παρά να σε πηγαίνει το goto. Το goto δεν σου δίνει την ικανοποίηση μέσω της προσπάθειας το οποίο για μένα είναι η μισή παρατήρηση. Δεν δουλεύεις με τον ουρανό. Δεν δουλεύεις με το χάρτη. Δεν δουλεύεις με τίποτα. Επίσης ένα κακό είναι ότι με το goto το τηλεσκόπιο γίνεται πολύπλοκο, κουβαλάς ένα σωρό παρελκόμενα και το σημαντικότερο αν τελειώσουν οι μπαταρίες τα μαζεύεις και πας για ύπνο. Πιστεύω ότι το goto είναι καλό για αστροπάρτυ. ΌΜΩΣ: Το να έχεις τη δυνατότητα να κάνεις tracking σαφώς είναι πολύ καλό γιατί σε κουράζει πολύ η διαδικασία να κάνεις διορθώσεις ειδικά αν δουλεύεις με μεγάλες μεγεθύνσεις. Αυτό συμβαίνει με τις στηρίξεις dob. Με τις ισημερινές το πρόβλημα δεν υφίσταται λόγω της κατασκευής που έχουν. Αλλά η ισημερινή είναι χρήσιμη μέχρι για μεσαία τηλεσκόπια (με το ζόρι 12"). -
Παλαιότερα (πριν από 10 χρόνια) πριν μπει η Κίνα στο παιχνίδι των τηλεσκοπίων, οι τιμές ήταν ασύστολα μεγάλες. Συγκεκριμένα το 2001 είχα προβεί στην αγορά ενός νευτώνειου 6" με ισημερινή στήριξη και το κόστος ήταν 500Ευρώ. Η κατασκευή του δεν είχε καμία σχέση με τα σημερινά τηλεσκόπια της κατηγορίας του. Ήταν η αρχές που η Κίνα έμπαινε ξεκινούσε να κατασκευάζει φτηνά τηλεσκόπια. Πηγαίνοντας ακόμη πιο παλιά οι τιμές ήταν πολύ παραπάνω. Τότε εκείνες τις εποχές καλύτερα να ξεκινούσες με κιάλια για να δεις τελικά αν σου αρέσει το χόμπι ώστε να επενδύσεις μετά σε ένα τηλεσκόπιο. Σήμερα και δη τα τελευταία 5-6 χρόνια οι τιμές ενός τηλεσκοπίου είναι πολύ προσιτές. Πιστεύω ότι σήμερα δεν συμφέρει να αγοράσεις κιάλια παρά να πας κατευθείαν σε τηλεσκόπιο. Μπορείς με 300Ευρώ να ξεκινήσεις με ένα dob 8" το οποίο θα σου δείξει πολλά περισσότερα από ένα ζευγάρια κιάλια και φυσικά μπορείς πολύ πιο εύκολα να το μεταπουλήσεις με χαμηλή ζημία.
-
απορία για dobson 8''
Μανούσος απάντησε στην συζήτηση του/της mst σε Η γωνιά των νέων αστροπαρατηρητών
Τα νευτώνεια τηλεσκόπια δεν έχουν χρωματικό σφάλμα κι αυτό γιατί αποτελούνται από κάτοπτρα και όχι από φακούς. Το χρωματικό σφάλμα είναι χαρακτηριστικό των φακών. -
Βοήθεια περί..Ερευνητή
Μανούσος απάντησε στην συζήτηση του/της Adomingo σε Λοιπά θέματα αστρονομικού εξοπλισμού
Ναι, αυτό μπορείς να το κάνεις περιστρέφοντας τον ερευνητή και τον πας όπου θέλεις. Νομίζω μπορείς να το κάνεις με όλους αυτό ανεξαρτήτου μάρκας. Πρόσεξε όμως γιατί οι right angle βγαίνουν σε 2 εκδόσεις. Η μία είναι με ορθό είδωλο και η άλλη με ανεστραμμένο αλλά προς μια κατεύθυνση και σε μπερδεύει. Κοίταζε αυτούς που λένε ότι είναι RACI (right angle corrected image). Ο καλύτερος συνδυασμός για μένα θα ήταν ένας RACI μαζί με telrad/rigel. Αλλά δεν ξέρω αν μπορείς να τους βάλεις και τους 2 στο τηλεσκόπιό σου. -
Απ' ότι θυμάμαι θα πρέπει μετά που το αποσυμπιέζεις να πας στις ρυθμίσεις των καταλόγων και να του πεις πού βρίσκεται κάνοντας το "πράσινο".
-
Απ' ότι κατάλαβα το εργαλείο είναι μόνο για το πρωτεύον κάτοπτρο και προϋποθέτει να έχει γίνει ευθυγράμμιση του δευτερεύοντος με κάποιο sight tube.